
STM32 HAL库 UART使用printf
// 添加这个函数 int fputc(int ch,FILE *f) { uint8_t temp[1]={ch}; HAL_UART_Transmit(&UartHandle,temp,1,2); }
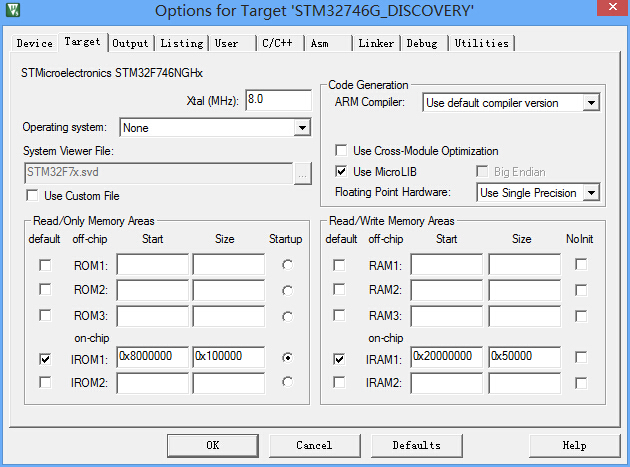
MDK设置:勾选Use Micro LIB
测试板子:STM32F746NG-DISCOVERY
main.c文件
/* Includes ------------------------------------------------------------------*/ #include "main.h" #include <stdio.h> /** @addtogroup STM32F7xx_HAL_Examples * @{ */ /** @addtogroup UART_TwoBoards_ComDMA * @{ */ /* Private typedef -----------------------------------------------------------*/ /* Private define ------------------------------------------------------------*/ #define TRANSMITTER_BOARD /* Private macro -------------------------------------------------------------*/ /* Private variables ---------------------------------------------------------*/ /* UART handler declaration */ UART_HandleTypeDef UartHandle; __IO ITStatus UartReady = RESET; __IO uint32_t UserButtonStatus = 0; /* set to 1 after User Button interrupt */ /* Buffer used for transmission */ uint8_t aTxBuffer[] = " ****UART_TwoBoards communication based on DMA**** ****UART_TwoBoards communication based on DMA**** ****UART_TwoBoards communication based on DMA**** "; /* Buffer used for reception */ uint8_t aRxBuffer[RXBUFFERSIZE]; /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); static void Error_Handler(void); static uint16_t Buffercmp(uint8_t* pBuffer1, uint8_t* pBuffer2, uint16_t BufferLength); static void MPU_Config(void); static void CPU_CACHE_Enable(void); /* Private functions ---------------------------------------------------------*/ UART_HandleTypeDef UartHandle; uint8_t sendbuf[]="send ok "; // 添加这个函数 int fputc(int ch,FILE *f) { uint8_t temp[1]={ch}; HAL_UART_Transmit(&UartHandle,temp,1,2); } /** * @brief Main program * @param None * @retval None */ int main(void) { /* Configure the MPU attributes as Write Through */ MPU_Config(); /* Enable the CPU Cache */ CPU_CACHE_Enable(); /* STM32F7xx HAL library initialization: - Configure the Flash ART accelerator - Systick timer is configured by default as source of time base, but user can eventually implement his proper time base source (a general purpose timer for example or other time source), keeping in mind that Time base duration should be kept 1ms since PPP_TIMEOUT_VALUEs are defined and handled in milliseconds basis. - Set NVIC Group Priority to 4 - Low Level Initialization */ HAL_Init(); /* Configure the system clock to 216 MHz */ SystemClock_Config(); /* Configure LED1 */ BSP_LED_Init(LED1); UartHandle.Instance = DISCOVERY_COM1; UartHandle.Init.BaudRate = 9600; UartHandle.Init.WordLength = UART_WORDLENGTH_8B; UartHandle.Init.StopBits = UART_STOPBITS_1; UartHandle.Init.Parity = UART_PARITY_NONE; UartHandle.Init.HwFlowCtl = UART_HWCONTROL_NONE; UartHandle.Init.Mode = UART_MODE_TX_RX; BSP_COM_DeInit(COM1,&UartHandle); BSP_COM_Init(COM1,&UartHandle); // HAL_UART_Transmit(&UartHandle,sendbuf,sizeof(sendbuf),10); /* Configure User push-button in Interrupt mode */ BSP_PB_Init(BUTTON_KEY, BUTTON_MODE_EXTI); /* Wait for User push-button press before starting the Communication. In the meantime, LED1 is blinking */ printf("hello"); while(UserButtonStatus == 0) { /* Toggle LED1*/ BSP_LED_Toggle(LED1); HAL_Delay(100); } /* Turn on LED1 if test passes then enter infinite loop */ BSP_LED_On(LED1); /* Infinite loop */ while (1) { } } /** * @brief System Clock Configuration * The system Clock is configured as follow : * System Clock source = PLL (HSE) * SYSCLK(Hz) = 216000000 * HCLK(Hz) = 216000000 * AHB Prescaler = 1 * APB1 Prescaler = 4 * APB2 Prescaler = 2 * HSE Frequency(Hz) = 25000000 * PLL_M = 25 * PLL_N = 432 * PLL_P = 2 * PLL_Q = 9 * VDD(V) = 3.3 * Main regulator output voltage = Scale1 mode * Flash Latency(WS) = 7 * @param None * @retval None */ void SystemClock_Config(void) { RCC_ClkInitTypeDef RCC_ClkInitStruct; RCC_OscInitTypeDef RCC_OscInitStruct; HAL_StatusTypeDef ret = HAL_OK; /* Enable HSE Oscillator and activate PLL with HSE as source */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLM = 25; RCC_OscInitStruct.PLL.PLLN = 432; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; RCC_OscInitStruct.PLL.PLLQ = 9; ret = HAL_RCC_OscConfig(&RCC_OscInitStruct); if(ret != HAL_OK) { while(1) { ; } } /* Activate the OverDrive to reach the 216 MHz Frequency */ ret = HAL_PWREx_EnableOverDrive(); if(ret != HAL_OK) { while(1) { ; } } /* Select PLL as system clock source and configure the HCLK, PCLK1 and PCLK2 clocks dividers */ RCC_ClkInitStruct.ClockType = (RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2); RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2; ret = HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_7); if(ret != HAL_OK) { while(1) { ; } } } /** * @brief Tx Transfer completed callback * @param UartHandle: UART handle. * @note This example shows a simple way to report end of DMA Tx transfer, and * you can add your own implementation. * @retval None */ void HAL_UART_TxCpltCallback(UART_HandleTypeDef *UartHandle) { /* Set transmission flag: trasfer complete*/ UartReady = SET; } /** * @brief Rx Transfer completed callback * @param UartHandle: UART handle * @note This example shows a simple way to report end of DMA Rx transfer, and * you can add your own implementation. * @retval None */ void HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle) { /* Set transmission flag: trasfer complete*/ UartReady = SET; } /** * @brief UART error callbacks * @param UartHandle: UART handle * @note This example shows a simple way to report transfer error, and you can * add your own implementation. * @retval None */ void HAL_UART_ErrorCallback(UART_HandleTypeDef *UartHandle) { Error_Handler(); } /** * @brief EXTI line detection callbacks * @param GPIO_Pin: Specifies the pins connected EXTI line * @retval None */ void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { if(GPIO_Pin == KEY_BUTTON_PIN) { UserButtonStatus = 1; } } /** * @brief Compares two buffers. * @param pBuffer1, pBuffer2: buffers to be compared. * @param BufferLength: buffer's length * @retval 0 : pBuffer1 identical to pBuffer2 * >0 : pBuffer1 differs from pBuffer2 */ static uint16_t Buffercmp(uint8_t* pBuffer1, uint8_t* pBuffer2, uint16_t BufferLength) { while (BufferLength--) { if ((*pBuffer1) != *pBuffer2) { return BufferLength; } pBuffer1++; pBuffer2++; } return 0; } /** * @brief This function is executed in case of error occurrence. * @param None * @retval None */ static void Error_Handler(void) { /* Turn LED1 on */ BSP_LED_On(LED1); while(1) { /* Error if LED1 is slowly blinking (1 sec. period) */ BSP_LED_Toggle(LED1); HAL_Delay(1000); } } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t* file, uint32_t line) { /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* Infinite loop */ while (1) { } } #endif /** * @brief Configure the MPU attributes as Write Through for SRAM1/2. * @note The Base Address is 0x20010000 since this memory interface is the AXI. * The Region Size is 256KB, it is related to SRAM1 and SRAM2 memory size. * @param None * @retval None */ static void MPU_Config(void) { MPU_Region_InitTypeDef MPU_InitStruct; /* Disable the MPU */ HAL_MPU_Disable(); /* Configure the MPU attributes as WT for SRAM */ MPU_InitStruct.Enable = MPU_REGION_ENABLE; MPU_InitStruct.BaseAddress = 0x20010000; MPU_InitStruct.Size = MPU_REGION_SIZE_256KB; MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS; MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE; MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE; MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE; MPU_InitStruct.Number = MPU_REGION_NUMBER0; MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0; MPU_InitStruct.SubRegionDisable = 0x00; MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE; HAL_MPU_ConfigRegion(&MPU_InitStruct); /* Enable the MPU */ HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT); } /** * @brief CPU L1-Cache enable. * @param None * @retval None */ static void CPU_CACHE_Enable(void) { /* Enable I-Cache */ SCB_EnableICache(); /* Enable D-Cache */ SCB_EnableDCache(); } /** * @} */ /** * @} */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/


文章对您有帮助,开心可以打赏我,金额随意,欢迎来赏!
需要电子方面开发板/传感器/模块等硬件可以到我的淘宝店逛逛

 浙公网安备 33010602011771号
浙公网安备 33010602011771号