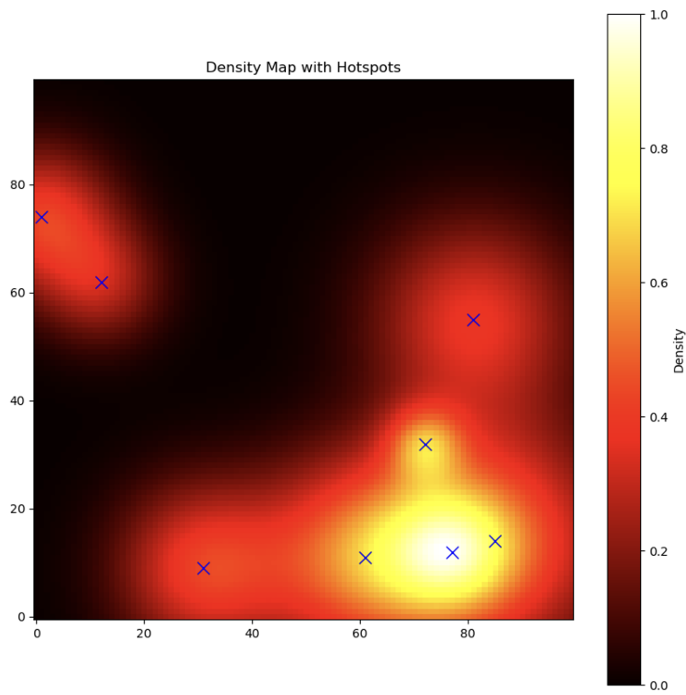
构建时间变化的势场ϕ ( x , y , t ) \phi(x, y, t)ϕ(x,y,t)来表示高优先级任务区域的空间强度和分布。该标量场由加权高斯函数的和组成: ϕ ( x , y , t ) = ∑ j = 1 M w j ( t ) ⋅ exp ( − ∥ ( x , y ) − ( x j ( t ) , y j ( t ) ) ∥ 2 2 σ j 2 ) \phi(x, y, t) = \sum_{j=1}^{M} w_j(t) \cdot \exp\left(-\frac{\|(x, y) - (x_j(t), y_j(t))\|^2}{2\sigma_j^2}\right)ϕ(x,y,t)=j=1∑Mwj(t)⋅exp(−2σj2∥(x,y)−(xj(t),yj(t))∥2) 其中,σ j \sigma_jσj 表示任务 j jj的空间影响半径。
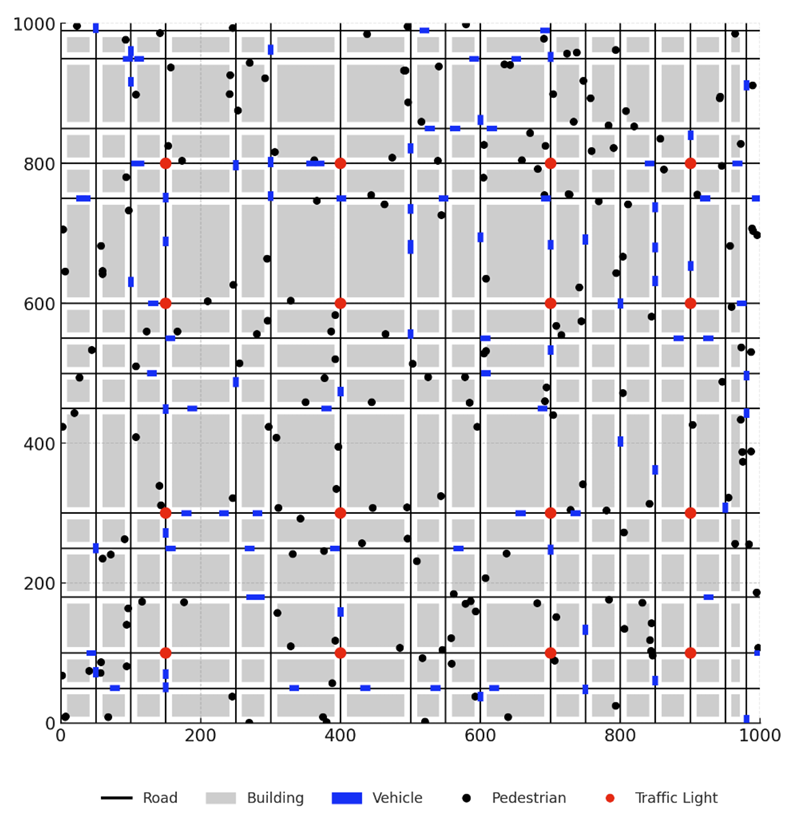
势场在建筑物等障碍物区域内被显式设置为零。
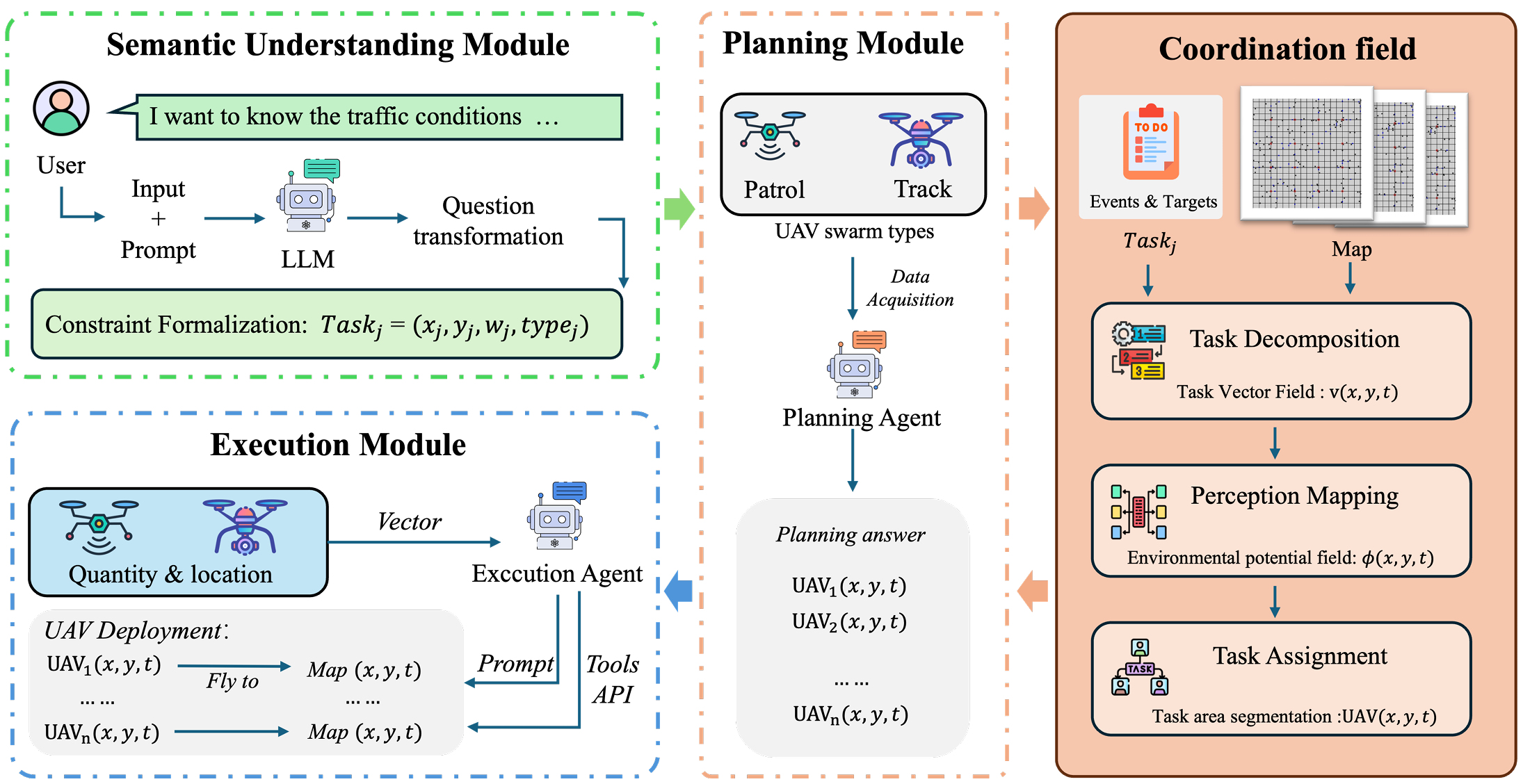
任务分解:
构建时间变化的矢量场v ( x , y , t ) v(x, y, t)v(x,y,t),表示无人机群的运动速度场。基于流体力学的纳维-斯托克斯方程定义运动方程: d v d t = − 1 ρ ∇ p + ν ∇ 2 v + F task ( ϕ ) \frac{dv}{dt} = -\frac{1}{\rho}\nabla p + \nu \nabla^2 v + F_{\text{task}}(\phi)dtdv=−ρ1∇p+ν∇2v+Ftask(ϕ) 其中,v ( x , y , t ) = ( v x , v y ) v(x, y, t) = (v_x, v_y)v(x,y,t)=(vx,vy)表示2D空间中每一点的速度向量,ν \nuν表示流体粘度,F task = k ∇ ϕ F_{\text{task}} = k \nabla \phiFtask=k∇ϕ是用于引导无人机向高势场值区域移动的外力项。
扩散项 ν ∇ 2 v \nu \nabla^2 vν∇2v有助于防止无人机过度集中在单个区域,增强空间分布和系统鲁棒性。
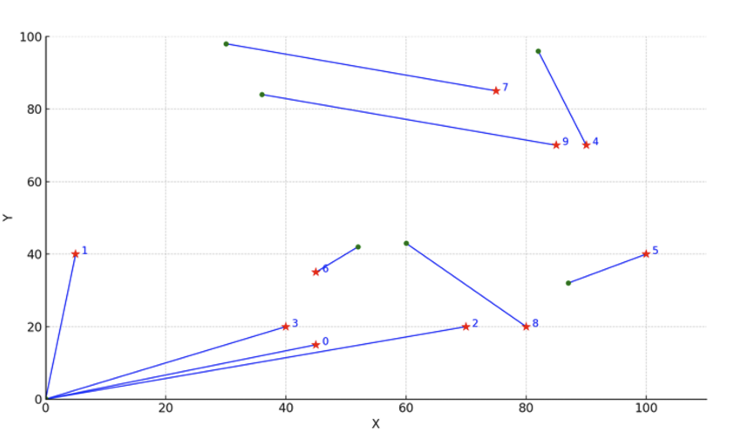
任务分配:
引入局部涡旋机制,为每个无人机生成一个旋转场,作为动态排斥控制策略。每个无人机i ii 在当前位置 ( x i , y i ) (x_i, y_i)(xi,yi)生成一个旋转场: ω i ( r ) = Γ i 2 π r exp ( − ( r r 0 ) 2 ) \omega_i(r) = \frac{\Gamma_i}{2\pi r} \exp\left(-\left(\frac{r}{r_0}\right)^2\right)ωi(r)=2πrΓiexp(−(r0r)2) 其中,r rr 是从无人机 i ii的径向距离,r 0 r_0r0是场的影响半径,Γ i \Gamma_iΓi是由无人机的能力分数c i ( t ) c_i(t)ci(t)和局部势场值ϕ ( x i , y i , t ) \phi(x_i, y_i, t)ϕ(xi,yi,t)决定的循环强度: Γ i ( t ) = c i ( t ) ⋅ ϕ ( x i ( t ) , y i ( t ) , t ) ∑ j = 1 N c j ( t ) \Gamma_i(t) = \frac{c_i(t) \cdot \phi(x_i(t), y_i(t), t)}{\sum_{j=1}^{N} c_j(t)}Γi(t)=∑j=1Ncj(t)ci(t)⋅ϕ(xi(t),yi(t),t)
基于该场,框架计算每个无人机的切向速度分量v θ , i ( r ) v_{\theta,i}(r)vθ,i(r),形成围绕每个无人机的排斥速度,模拟代理间的避碰动态: v θ , i ( r ) = Γ i 2 π r ( 1 − exp ( − ( r r 0 ) 2 ) ) v_{\theta,i}(r) = \frac{\Gamma_i}{2\pi r} \left(1 - \exp\left(-\left(\frac{r}{r_0}\right)^2\right)\right)vθ,i(r)=2πrΓi(1−exp(−(r0r)2))
最终,每个无人机的控制速度向量经过将全局引导速度场v ( x , y , t ) v(x, y, t)v(x,y,t)与所有无人机生成的切向排斥速度叠加得到: v new ( x , y , t ) = v ( x , y , t ) + ∑ i = 1 n v θ , i ( x , y , t ) v_{\text{new}}(x, y, t) = v(x, y, t) + \sum_{i=1}^{n} v_{\theta,i}(x, y, t)vnew(x,y,t)=v(x,y,t)+i=1∑nvθ,i(x,y,t) 该机制确保无人机不仅被引导到高优先级任务区域,还通过局部涡旋效应相互排斥,从而在完全去中心化的设置中建立动态稳定的任务分配和协调行为。
执行模块
核心任务:将规划模块的输出(包括流场矢量v new ( x , y , t ) v_{\text{new}}(x, y, t)vnew(x,y,t)和无人机任务分配信息)转换为物理或模拟无人机可执行的实时控制命令。
执行过程:
执行代理通过标准化API接口(如MAVSDK、ROS2或AirSim)与底层控制系统通信。
在任务执行阶段,每架无人机根据当前位置( x , y , t ) (x, y, t)(x,y,t)从预计算的控制场v new ( x , y , t ) v_{\text{new}}(x, y, t)vnew(x,y,t)中采样局部速度向量,并将其用作下一个导航方向。
执行代理根据任务类型生成飞行控制命令,并将其发送到无人机平台。
无人机在动态环境中持续报告其状态(包括位置、速度和执行状态),用于实时刷新任务势场ϕ ( x , y , t ) \phi(x, y, t)ϕ(x,y,t) 和流场矢量 v ( x , y , t ) v(x, y, t)v(x,y,t)。





 浙公网安备 33010602011771号
浙公网安备 33010602011771号