
神经网络自适应滤波器延迟向量的计算原理
---恢复内容开始---
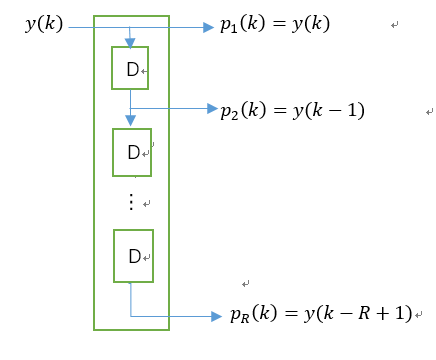
1、抽头延迟线
为了将ADALINE网络用作自适应滤波器,我们先介绍一个新的构造块;抽头延迟线。如下图所示为带有R个输出的抽头延迟线。信号从左边输入,在延迟线的输出端是一个R维的向量,包含当前时刻的输入信号和分别延迟了1到R-1时间步长的输入信号。
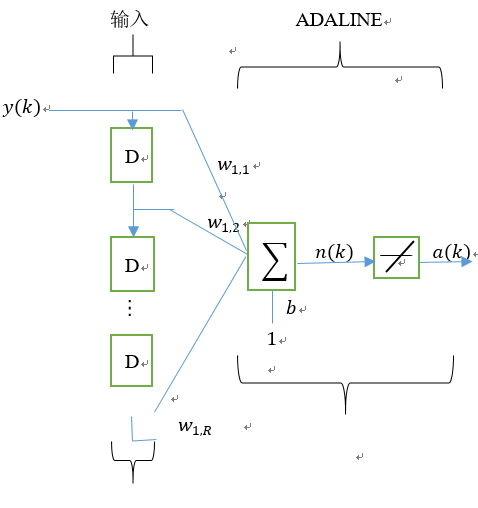
2、自适应滤波器
若将一个延迟线与一个ADALINE网络结合起来,我们就能得到一个自适应滤波器如下图所示,滤波器的输出为:

3、举例
输入向量 p ,期望输出向量 T,以及输入延迟向量Pi。
P={1 2 1 3 3 2};
Pi={1 3};
T={5.0 6.1 4.0 6.0 6.9 8.0};
%应用newlind函数构造一个网络以满足上面的输入/输出关系和延迟条件
net=newlind(P,T,Pi)
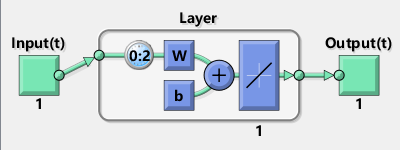
view(net)
y=net(P)
W=net.IW{1,1}%神经网络的权重
b=net.b{1}%神经网络的阈值
y =
[1.0554] [2.9757] [4.0189] [6.0054] [6.8959] [8.0122]
W =
0.9568 0.9635 1.0365
b =
0.0986
神经网络的训练过程:
其计算原理如下:
输入向量P={1 2 1 3 3 2}由于延迟向量Pi{1 3}的作用变成了六维向量

即每个输入变成了自身再加上前两个延迟,


…

在王老师的启发下终于决定写下人生第一个博客,延迟向量的问题困扰我近一周,在网上也没能找到答案,于是自己花了几天时间请教老师和同学感谢阿信老师和小平兄弟在百忙之中的帮助,终于把这个问题解决希望对别人有所帮助。
---恢复内容结束---

