生成式对抗网络
生成式对抗网络
GAN
Generative Adversarial Nets, 生成式对抗网络
-
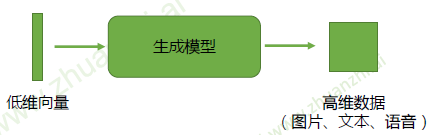
生成模型
-
-
生成式对抗网络(GAN)的目的是训练这样一个生成模型,生成我们想要的数据
-
-
GAN框架
-

-
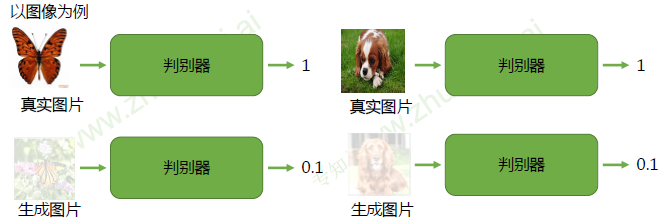
判别器(Discriminator):区分真实(real)样本和虚假(fake)样本。对于真实样本,尽可能给
出高的评分1;对于虚假数据,尽可能给出低个评分0 -
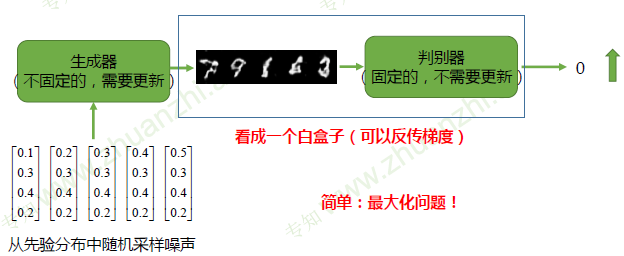
生成器(Generator):欺骗判别器。生成虚假数据,使得判别器D能够尽可能给出高的评分1
-
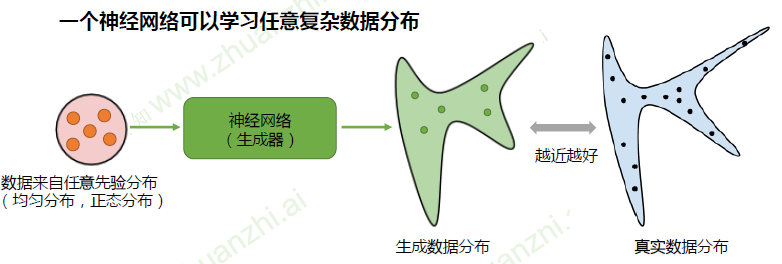
随机噪声z:从一个先验分布(人为定义,一般是均匀分布或者正态分布)中随机采样的向量(输入的向量维度越高,其生成图像的种类越多)
-
真实样本x:从数据库中采样的样本
-
合成样本G(z):生成模型G输出的样本
-
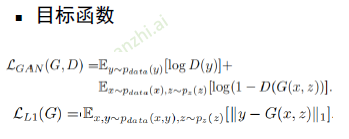
目标函数:
-

-

-
让真实样本的输出值尽可能大,同时让生成样本的输出值尽可能小
-
所以判别器D最大化的目标函数就是对于真实样本尽可能输出1,对于生成器的生成样本输出0
-
生成器G最小化目标函数就是让生成样本能够欺骗判别器,让其尽量输出1
-
-
-
训练算法
- 随机初始化生成器和判别器
- 交替训练判别器D 和生成器G,直到收敛
-
固定生成器G,训练判别器D区分真实图像与合成图像
-

- 一个样本x来自真实分布\(P_{data}\)和生成分布\(P_g\)概率的相对比例
- 如果来自生成分布的概率为0(\(P_g = 0\)),那么就给出概率1,即确定该样本是真的
- 如果来自真实分布的概率为0(\(P_{data} = 0\)),那么就给出概率0,即确定该样本是假的
- 因为最优判别器的输出属于[0,1] ,所以判别器的输出用sigmoid激活
-

-
固定判别器D,训练生成器G欺骗判别器D
-
-
-
KL散度:一种衡量两个概率分布的匹配程度的指标
-
当\(P_1 = P_2\)时,KL散度为零
-

-
具有非负性,但存在不对称性(在优化的时候,会因为不对称性优化出不同的结果)
-
极大似然估计 等价于 最小化生成数据分布和真实分布的KL散度
-
-
JS散度
-

-
具有非负性,以及对称性
-
-
- 但存在问题:生成数据和真实数据分布的表达形式我们不知道,无法计算散度,也就没有目标函数,
无法优化生成器 - GAN:生成式对抗网络通过对抗训练,间接计算出散度(JS),使得模型可以优化
- 最大化判别器损失,等价于计算合成数据分布和真实数据分布的JS散度
- 最小化生成器损失,等价于最小化JS散度(也就是优化生成模型)
- 但存在问题:生成数据和真实数据分布的表达形式我们不知道,无法计算散度,也就没有目标函数,

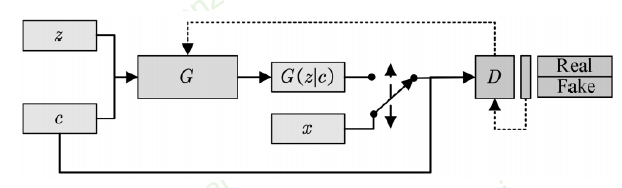
cGAN
Conditional GAN, 条件生成式对抗网络
- 网络结构
-
-
为了能够满足条件生成,所以需要添加一个class标签
-
对于生成器而言,没啥变化,只是增加了一个label输入
-
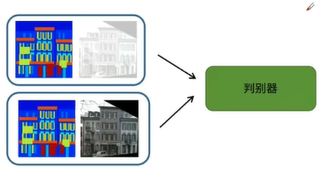
对于判别器而言,输入为图片以及对应标签;判别器不仅判断图片是否为真,同时也要判断时候和标签匹配
- 真实图片+正确label==》1
- 真实图片+错误label==》0
- 合成图片+任意label==》0
-
DCGAN
Deep Convlutional GAN, 深度卷积生成式对抗网络
-
原始GAN,使用全连接网络作为判别器和生成器
- 不利于建模图像信息
- 参数量大,需要大量的计算资源,难以优化
-
DCGAN,使用卷积神经网络作为判别器和生成器
-
通过大量的工程实践,经验性地提出一系列的网络结构和优化策略,来有效的建模图像数据
-
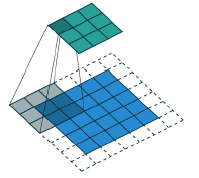
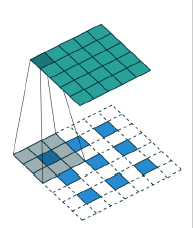
判别器
- 通过Pooling下采样,Pooling是不可学习的,这可能造成GAN训练困难
- 使用滑动卷积(步长大于1),让其可以学习自己的下采样策略
-
生成器:滑动反卷积
- 通过插值法上采样,插值方法是固定的,不可学习的,这可能给训练造成困难
- 使用滑动反卷积(进行扩展),让其可以学习自己的上采样策略
WGAN/WGAN-GP
Wasserstein GAN with Weight Clipping/ Gradient Penalty
-
原始GAN存在的问题
- 训练困难:生成器无法生成想要的数据
- 模式崩塌:生成器无法学习到完整的数据分布
-
JS散度
-
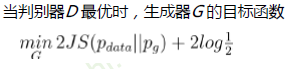
已知GAN网络的目标函数
-
所以可以看到GAN网络的训练效果是和JS散度相关联的
-

- 分析任意一个点x对JS散度的贡献:
- 当\(P_1(x) = 0 and P_2(x)=0\)(即该数据既没有在真实数据中出现,也没有在生成数据中出现)
- \(JS(P_1||P_2)=0\),对计算JS散度无贡献
- 当\(P_1(x) != 0 and P_2(x)=0\)或\(P_1(x) = 0 and P_2(x)!=0\)
- 贡献等与常数\(log2\),但梯度等于零
- 当\(P_1(x) != 0 and P_2(x)!=0\)
- 对计算JS散度有贡献且不为常熟,因此梯度不为零
- 当\(P_1(x) = 0 and P_2(x)=0\)(即该数据既没有在真实数据中出现,也没有在生成数据中出现)
- 分析任意一个点x对JS散度的贡献:
-
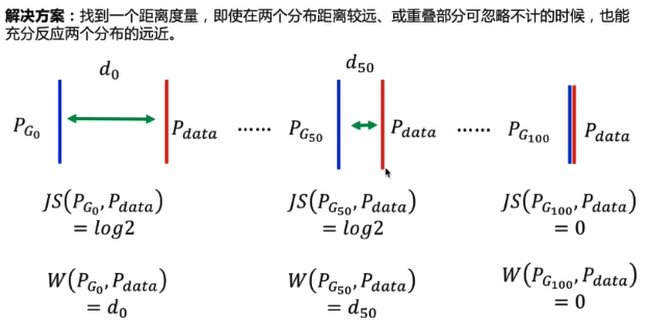
但\(P_{data}(x)\)与\(P_g(x)\)发生不重叠(或重叠部分可忽略)的可能性非常大,即\(P_1(x) != 0 and P_2(x)!=0\)这种情况发生概率很小
-
GAN:真实数据分布\(P_{data}\)和生成数据分布\(P_G\)是高维空间中的维度流形,它们重叠的区域可以忽略不记(能够提供梯度信息的数据可以忽略不记) == =》所以无论它们相距多少,其JS散度都是常数(仅当完全重合时,JS散度为零),导致生成器的梯度(近似)为零,造成梯度消失===》GAN优化困难
-
-
Wasserstein距离
-
-
\(W(P_1,P_2) = inf_{γ\sim\prod(P_1,P_2) E_{(x,y)\simγ}[||x-y||]}\)
-
\(\prod(P_1,P_2)\):P1和P2组合起来的所有可能的联合分布的集合
-
\(|| x - y ||\):样本x和y的距离
-
inf:所有可能的下界
-
假设对于P1和P2上的点x,y有一个联合分布γ;在这个联合分布上取一对点(x,y),计算他们的距离\(||x-y||\),然后通过很多的点,计算出它的期望;然后我们再遍历所有可能的联合分布,得到一个最小的距离,就是我们定义的W距离。
-
e.g
-
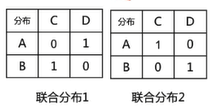
假设有两个离散的分布,每个分布只包含两个点(A、B和C、D),每个点的出现概率相等,横竖距离均为1
-

-
通过这个分布,可以计算出距离\(||x-y||\)
-
距离 C D A 1 \(\sqrt{2}\) B \(\sqrt{2}\) 1
-
-
下面讨论所有可能出现的联合分布形式,下面仅举例其中可能的两种
-
-
在联合分布1下,可以计算出期望\(2\sqrt2\)
-
同理,在联合分布2下,计算得出期望为2(可以得到是所有可能的联合分布中最小的期望值)
-
-
所以得到W距离为2
-
-
可以理解为:将分布P1移动到分布P2,已知彼此距离\(||x-y||\),选择一个合适的移动方案γ(联合分布),让走的路径最小,就是W距离。
- 在最优的路径规划γ下,把土堆从P1移动到P2所需的路径(最短距离消耗)
-
但inf(穷举所有可能,取下界)项无法直接求解
-
-

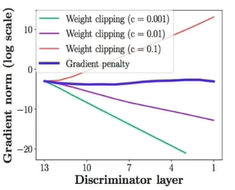
- 为了解决其中李普希思系数存在的限制,使用了权重截断的方法
- 权重截断:在每次优化判别器D之后,把D的权重的绝对值限制在某个范围
-

-
-
WGAN-GP
-
WGAN存在的问题
- 权重二值化:WGAN几乎所有参数都是正负0.01,浪费神经网络的拟合能力(权重截断)
- 梯度衰减、爆炸(权重截断的截断阈值)
-
WGAN-GP:把Lipschitz限制作为一个正则项加到Wasserstein损失上,在优化GAN损失的同时,尽可能满足Lipschitz限制
-

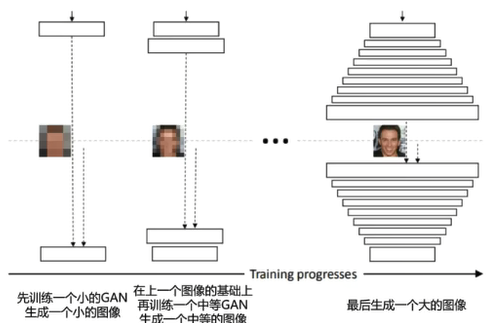
Progressive GAN
SN-GAN
谱归一化层实现利普希茨连续
- WGAN:权重截断--> 权重二值化、梯度消失/爆炸
- WGAN-GP:惩罚项--> 收敛速度仍然慢于DCGAN
- SN-GAN:每层权重除以该层矩阵谱范数即可满足利普希茨连续
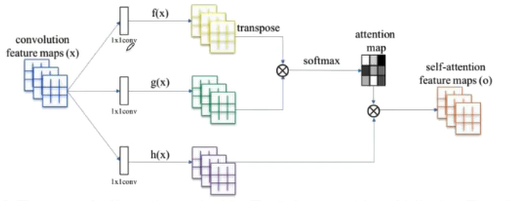
Self-Attention GAN
建模长距离依赖关系
- 原始GAN存在的问题
- 局部效果很逼真,全局效果不逼真
- 引入自注意力机制
-
建立一个长距离依赖关系
-
-
让最终的输出每一部分不仅仅是和对应的感受野相关,也和整体全局相关联
-
BigGAN
- 增大Batch Size
- 噪声不单单加在输入层,还加在中间层
- 截断技巧
- 在一个分布中采样噪声,如果噪声超过阈值,则丢弃再次采样
- 阈值越大,图片多样性越好,但图片质量会略微下降
- 阈值越小,图片多样性越差,但图像质量更好
实战项目-基础
- 图像翻译
- 学习图像到图像的映射
- 黑白图像-->彩色图像:学习彩色图像的条件分布
- 学习图像到图像的映射
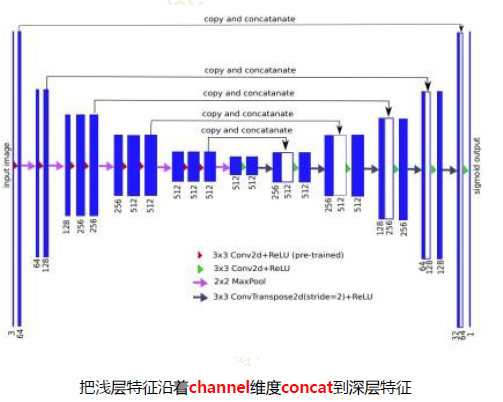
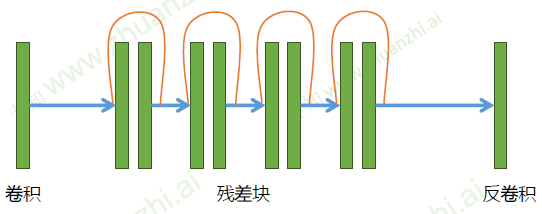
- U-NET
-
神经网络中,浅层卷积核提取Low-Level特征,深层卷积核提取High-Level特征
-
High-Level特征:分类、检测需要对图像深层理解等任务
-
Low-Level特征:保留更多图像细节
-
图像翻译任务:需要Low-Level和High-Level 特征
-
-
ResGenerator
- 在残差网络中,通过残差的形式,不断向后传递
- 同时还解决了退化的问题
-
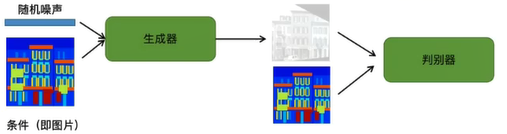
Pixel2Pixel
用cGAN实现图像翻译
- 已知我们有一一对应的数据集(例如:轮廓<-->建筑)
- 使用cGAN
-
首先输入轮廓和随机噪声,通过生成器生成建筑图像,再将输入和建筑图像输入到判别其中
-
-
判别器进行判断,输出判别值
-
-
-
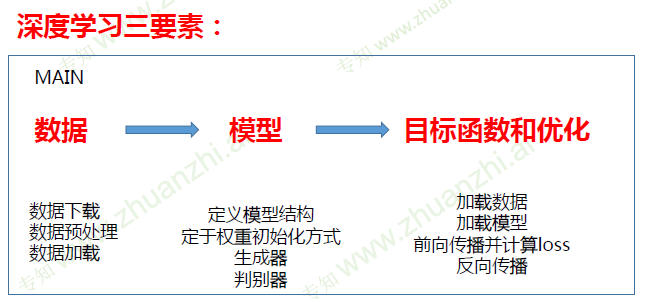
深度学习三要素
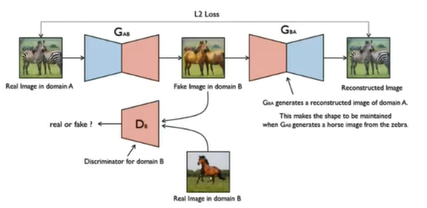
CycleGAN
无须paired数据,学习图像翻译
-
有两组数组,但彼此之间并不是一一对应
-
因为没有很好的全局损失信息,可能会出现生成的结果不能保持对应的位置信息等
-
eg
- CycleGAN中,首先将斑马生成马,然后再将马重新返回生成斑马,然后比对原始斑马和生成的斑马的损失,即可以保存一定的位置等信息
-
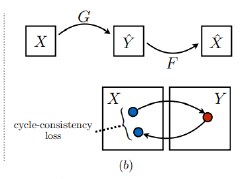
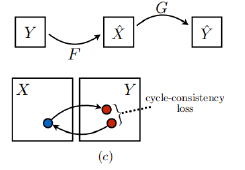
循环一致性损失
-
·对于输入图像:将生成图像重建回输入图像,应当让原始输入图像和重建的输入图像尽可能相似
-
-
同理,有
-
-
-
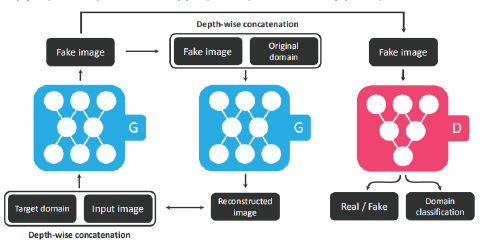
StarGAN
一个GAN,多种数据,任意变换
- 与GAN相比,其输入多了一个Target domain,输出多了一个Domain classification,用来分类表情的种类
- 于此同时还增加了一个循环一致性损失
- 对于生成器生成的Fake image,和期望表情的标签一起返回给生成器,让其尽可能地再次还原出原始的输入图像