

完整教程:构网型逆变器虚拟同步控制策略深度解析
摘要
随着新能源发电在电力系统中的占比不断提高,构网型逆变器作为连接分布式能源与电网的关键接口,其控制策略对电网稳定性产生核心影响。虚拟同步控制技术借助模拟同步发电机的运行特性,使逆变器具备惯性支撑和阻尼特性,有效提升了电力系统的稳定性。本文从同步发电机数学模型出发,深入剖析虚拟同步控制的基本原理,详细推导其数学模型和控制结构,分析关键参数设计方法,并通过仿真验证控制策略的有效性。
1. 引言
1.1 研究背景
传统电力系统以同步发电机为重要电源,其固有的旋转惯量和阻尼特性为系统提供了必要的稳定性支撑。然而,随着光伏、风电等可再生能源的大规模接入,电力电子变流器逐渐取代同步发电机成为主要的并网接口。这些变流器通常采用跟网型控制策略,其响应速度快但缺乏惯性,导致系统等效惯量下降,频率稳定性问题日益突出。
1.2 虚拟同步控制的意义
完成新型电力系统安全稳定运行的关键技术之一。就是虚拟同步控制通过控制算法使逆变器模拟同步发电机的运行特性,为系统提供虚拟惯性和阻尼,管用解除了高比例新能源接入带来的稳定性挑战。该技术不仅提高了系统的频率稳定性,还增强了体系的电压支撑能力,
2. 同步发电机数学模型
2.1 转子运动方程
同步发电机的转子运动特性由其机械动力学方程描述:
其中:
为转动惯量(kg·m²)
为转子角速度(rad/s)
为机械转矩(N·m)
为电磁转矩(N·m)
为阻尼系数
为同步角速度(rad/s)
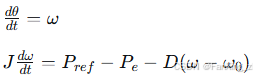
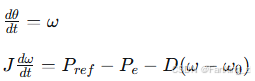
在电力系统分析中,通常采用标幺值形式表示:
![]()
其中:
为惯性时间常数
为机械功率
为电磁功率
2.2 电磁特性方程
同步发电机的输出电压幅值由励磁系统控制:
![]()
其中:
为内电势幅值
为空载电势
为无功调差系数
为无功功率参考值
为实际无功功率
3. 虚拟同步控制原理
3.1 基本控制思想
虚拟同步控制的核心思想是通过控制算法使逆变器模拟同步发电机的动态响应特性。当系统频率发生变化时,虚拟同步控制的逆变器能够通过调节输出功率来响应频率变化,其响应特性类似于同步发电机的惯性和阻尼特性。
3.2 有功-频率控制
虚拟同步控制的有功-频率控制环路基于同步发电机的转子运动方程:
其中:
为虚拟转子角度
为有功功率参考值
通过调节虚拟角速度,控制系统可以响应系统的频率变化,提供必要的惯性支撑。
3.3 无功-电压控制
无功-电压控制模拟同步发电机的励磁系统特性:
![]()
该控制环路通过调节输出电压幅值来维持系统电压稳定,并建立无功功率的合理分配。
4. 虚拟同步控制器设计
4.1 控制系统结构
虚拟同步控制系统的完整结构包括以下重要模块:
有功-频率控制模块:实现转子运动方程的模拟
无功-电压控制模块:实现励磁系统的模拟
电压电流双环控制模块:实现输出电压的精确跟踪
功率计算模块:实时计算输出有功和无功功率
4.2 数学模型推导
考虑三相逆变器的数学模型,在dq旋转坐标系下:
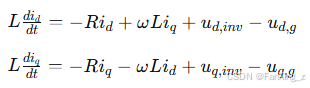
其中:
、
为dq轴电流分量
、
为逆变器侧dq轴电压
、
为电网侧dq轴电压
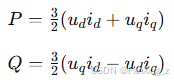
输出功率计算:
虚拟同步控制器的核心算法:
4.3 小信号稳定性分析
为分析系统稳定性,建立虚拟同步控制系统的小信号模型。在稳态工作点附近线性化:
考虑电网电压扰动和线路阻抗变化,系统的特征方程可表示为:
![]()
其中$A$为系统状态矩阵。通过特征值分析可以评估平台的稳定性和动态性能。
5. 关键参数设计
5.1 虚拟惯量J设计
虚拟惯量决定了系统对频率变化的响应速度。设计时需要综合考虑:
频率稳定性要求:较大的
系统强度:在弱电网条件下,过大的
功率限制:需确保虚拟惯量释放或吸收的功率不超过逆变器的容量限制
工程设计中,的取值通常满足:
![]()
其中:
为系统等效惯性时间常数
为逆变器额定容量
5.2 阻尼系数D设计
阻尼系数影响系统的动态响应特性,设计原则包括:
超调量限制:适当的
响应速度:过大的
稳定性要求:保证系统在各种工况下的稳定性
通常采用极点调整法或频域分析法确定的最优值。
5.3 无功调差系数K_q设计
影响无功功率的分配精度和电压稳定性:
无功分配精度:较大的
电压稳定性:过大的
架构强度适应性:需适应不同短路比条件下的稳定运行
6. 仿真验证
6.1 仿真模型搭建
基于MATLAB/Simulink搭建虚拟同步控制系统仿真模型,主要参数如下:
| 参数 | 数值 | 单位 |
|---|---|---|
| 额定功率 | 10 | kW |
| 直流电压 | 700 | V |
| 交流电压 | 380 | V |
| 电网频率 | 50 | Hz |
| 虚拟惯量J | 0.2 | kg·m² |
| 阻尼系数D | 10 | N·m·s/rad |
6.2 频率阶跃响应
在0.5秒时施加频率阶跃扰动,从50Hz降至49.5Hz,观察虚拟同步控制的响应特性。仿真结果显示,虚拟同步逆变器能够迅速增加输出功率,有效抑制频率下降,表现出良好的惯性响应特性。
6.3 负载突变测试
在系统稳定运行过程中,突加50%额定负载,观察系统的动态响应。仿真结果表明,虚拟同步控制能够平滑调节输出功率,维持系统频率稳定,验证了控制策略的有效性。
7. 工程应用挑战与解决方案
7.1 弱电网适应性
在弱电网条件下,线路阻抗较大,传统虚拟同步控制可能出现稳定性难题。解决方案包括:
引入电网电压前馈补偿
自适应参数调整策略
基于阻抗重塑的稳定性增强方法
7.2 多机并联运行
多台虚拟同步逆变器并联运行时,需解决以下问题:
功率精确分配
环流抑制
协同控制策略
7.3 故障穿越能力
虚拟同步控制在电网故障期间需具备故障穿越能力,关键技术包括:
电流限制策略
电压支撑控制
对称和不对称故障处理
8. 结论
虚拟同步控制技术利用模拟同步发电机的运行特性,使逆变器具备了必要的惯性和阻尼特性,有效提升了高比例新能源电力系统的稳定性。本文从理论基础、数学模型、控制设计和参数整定等方面对虚拟同步控制进行了深入分析,并借助仿真验证了其有效性。
未来研究方向包括:
适应更复杂电网条件下的自适应虚拟同步控制
多时间尺度协调控制策略
与储能系统结合的虚拟惯性优化利用
基于人工智能的智能虚拟同步控制
虚拟同步控制作为构网型逆变器的核心技术,将在未来新型电力系统中发挥越来越关键的作用。
参考文献
Zhong, Q. C., & Weiss, G. (2011). Synchronverters: Inverters that mimic synchronous generators. IEEE Transactions on Industrial Electronics, 58(4), 1259-1267.
Beck, H. P., & Hesse, R. (2007). Virtual synchronous machine. International Conference on Electrical Engineering, 1-6.
D'Arco, S., & Suul, J. A. (2014). Equivalence of virtual synchronous machines and frequency-droops for converter-based microgrids. IEEE Transactions on Smart Grid, 5(1), 394-395.
沈沉, 贾宏杰, & 陈来军. (2016). 虚拟同步发电机技术及其应用. 电力系统自动化, 40(21), 165-175.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号