蒙皮动画技术(Skinned Animation)
蒙皮动画(Skinned Animation)
过程概述
DCC 过程:
- 创建一个 binding pose 的 mesh
- 创建一个 binding pose 的 skeleton
- 对 Mesh 每个顶点进行设置,设置其受各 joint 影响的权重
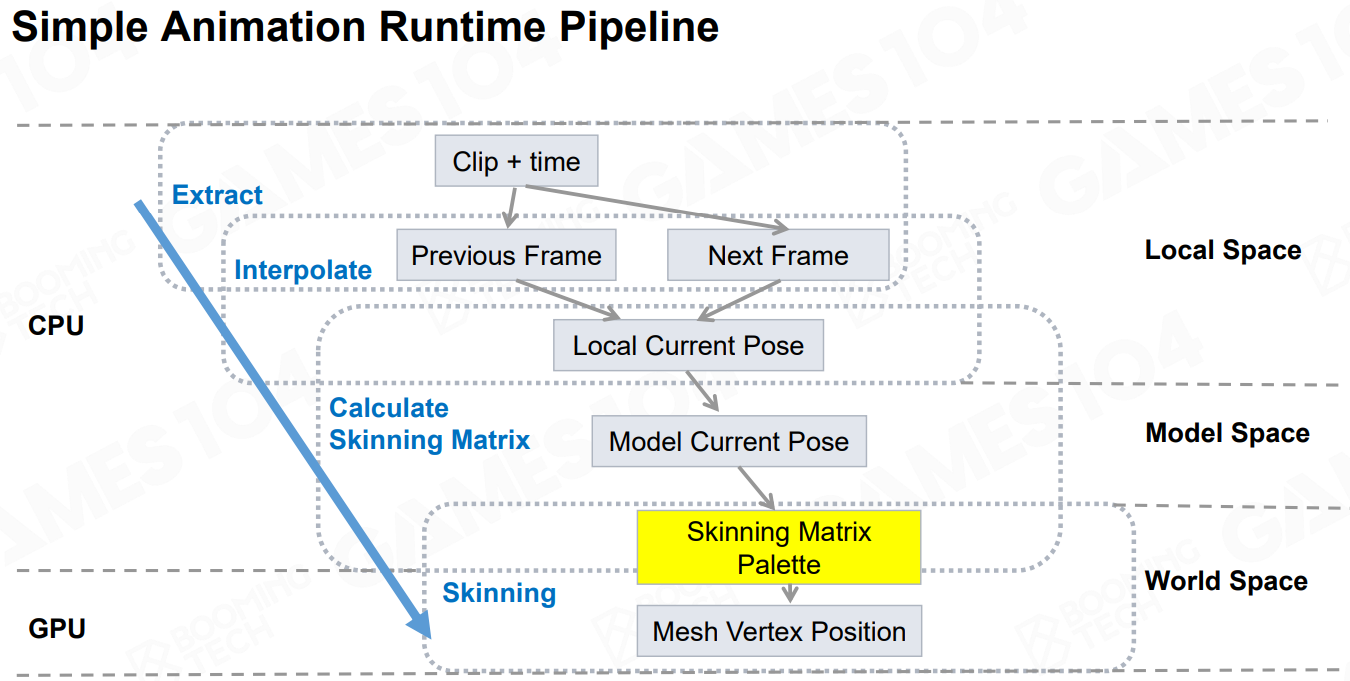
CPU(每帧):
- 解压动画 Clip,并通过 time 访问到相邻两个关键帧 pose
- 对两个关键帧 pose 进行插值计算得到当前帧的 local space pose,然后再转换成 model space
- 传入 Skinning Matrix Palette 到 GPU
GPU(每帧):
- 渲染角色 mesh(vertex shader 需根据 Skinning Matrix Palette 变换 vertex)
姿势 (Pose)
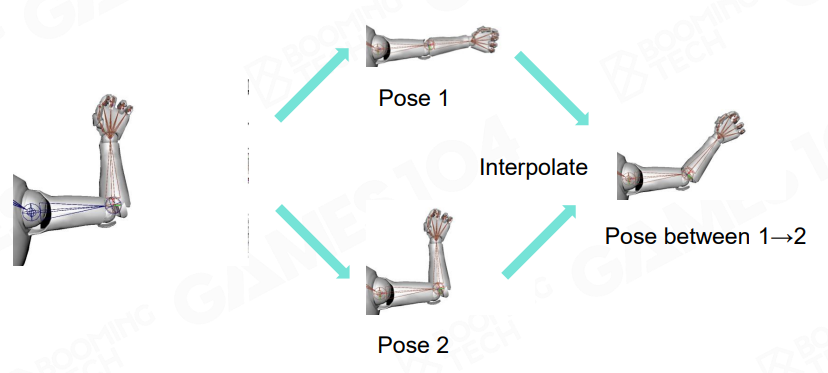
pose 是角色的某种静止状态,而艺术家设计出多个关键帧的 pose ,然后通过某种插值算法来产生动作(pose 之间的渐变)。
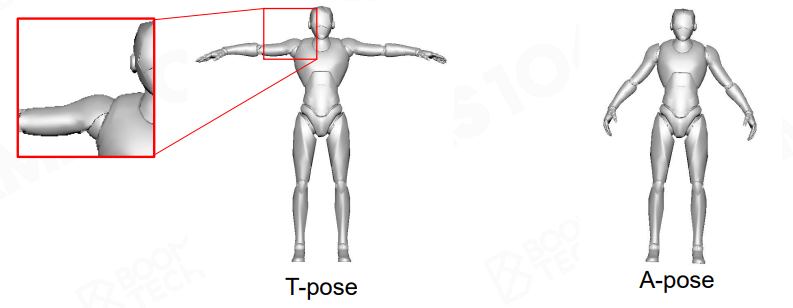
binding pose(绑定姿势):艺术家进行创作时的初始 pose,往往会让角色呈现出一种比较自然和展开的姿势,以方便创作
主流有两种绑定姿势:T-pose 和 A-pose,业界一般会更倾向于使用 A-pose,这是因为 A-pose 的肩膀会更加自然放松(高精度)而 T-pose 的肩膀容易出现挤压(低精度)
关节 (Joint) & 骨骼 (Bone)
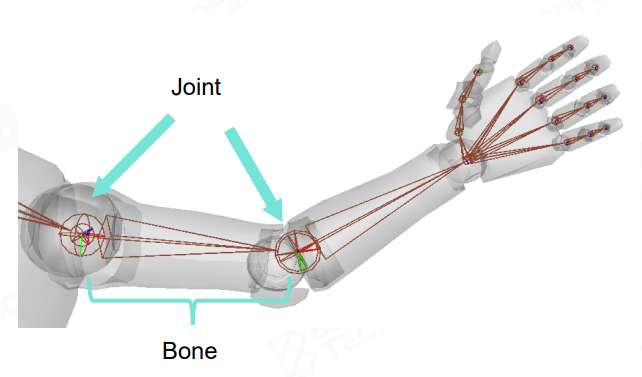
关节 (Joint):存储关节的旋转、位移、拉伸属性(共 9 DoFs),并且存在父子关节的关系;通过修改关节的属性,来驱动 skeleton 的变化,从而产生角色动画
一般角色拥有 50~100 个 joint;而表示生动的面部表情和加上 gameplay 用途的 joint,则可能超过 300+ 个joint
struct Joint
{
String m_joint_name;
UINT8 m_parent_joint_index;
Translation m_bind_pose_translation;
Rotation m_bind_pose_rotation;
Scale m_bind_pose_scale;
Matrix4X3 m_inverse_bind_pose_transform;
};
骨骼 (Bone):抽象的概念,每对父子关节之间的位移就是一段骨骼
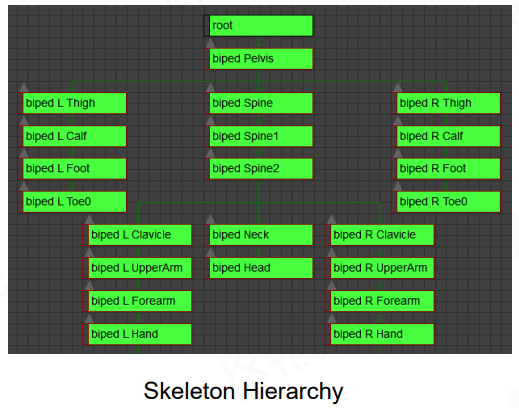
骨架 (skeleton):其实就是多个 joint 组成的骨骼层次体系,用来管理 joints
struct Skeleton
{
UINT m_joint_count; // number of joints
Joint m_joints[]; // array of joints
};
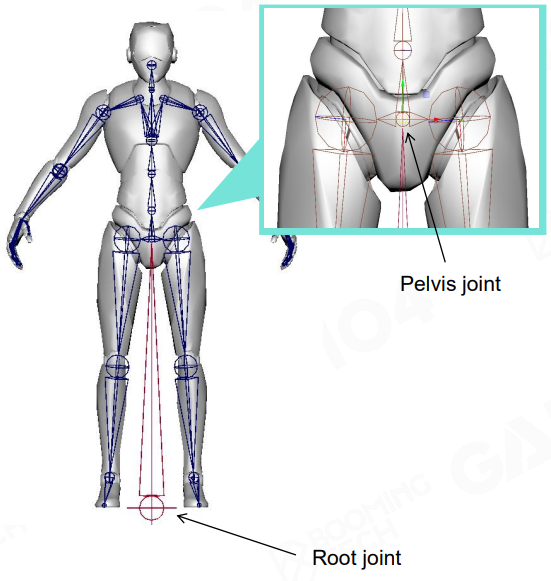
以下是一些特殊的 joint:
- root joint: 双脚底的中心,方便贴合在地面上
- pelvis joint: root joint 的第一个子关节,方便分离开上半身和下半身
- weapon joint: 常常设置在武器把柄上,方便与 mount joint 贴合
- mount joint: 常常设置在手上,方便与 weapon joint 贴合
蒙皮矩阵 (Skinning Matrix)
Local Space, Model Space, World Space
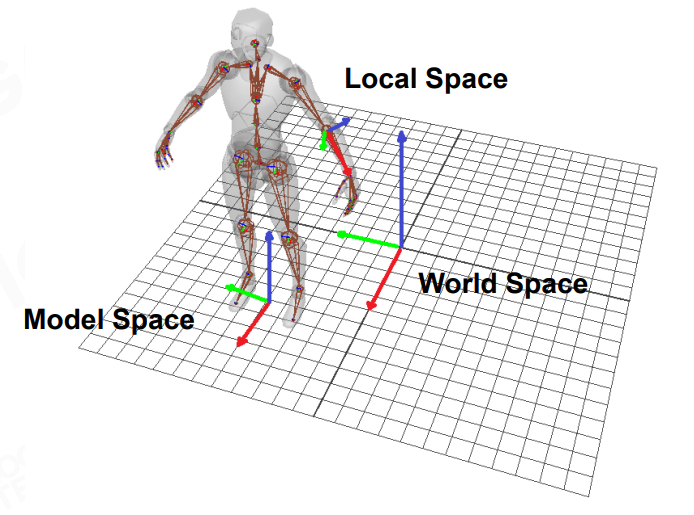
由于 joint 之间存在父子关系,因此也需要理清各个 space 的关系:
Local Space:相对于父节点(parent joint)的空间
Model Space:相对于根节点(root joint)的空间
World Space:相对于场景原点的空间
计算 Joint Pose Matrix
对于某个 joint \(j\),它的 pose 实际上就是 Scale, Rotation, Translation 属性组成的变换:
\(M^{local}_{j}\) :joint \(j\) 的 local space pose
类似于模型变换,都有 SRT 属性,只不模型变换是对整个模型(例如整个角色)的 SRT 变换,而 joint pose 是局部到某个关节的 SRT 变换
然后,为了计算出 \(j\) 的 model space pose,还得知道 \(j\) 的 parent joint 的 model space pose,即:
\(p(j)\) :joint \(j\) 的 parent joint
\(M_{j}^{model}\) : joint \(j\) 的 model space pose
计算 Skinning Matrix
通常来说,DCC 在记录一个角色模型 mesh 的顶点时,会记录它们在 binding pose 下的 model space 位置而不是 local space 位置。
为此,如果需要用到顶点的 local space 位置,则必须通过下式计算出来(假定顶点 \(V\) 只受该 joint \(j\) 影响):
\(M_{b(j)}^{model}\) : joint \(j\) 的 model space binding pose
在实际每帧运行(第 \(t\) 帧)中,假如我们已经通过逻辑驱动了 skeleton(或者说各个 joint)的变化。
那么要算出顶点的 model space 位置,就得通过下式:
\(\left(M_{b(j)}^{model}\right)^{-1}\) :也可以叫 inverse binding pose matrix
由于 binding pose 是固定的,不会随着时间 \(t\) 的变化而变化,因此可以在每个 joint 中计算一遍并存储对应的 inverse binding pose matrix ,以便之后每帧计算顶点 model space 位置直接读取使用,而不必重新计算一遍。
其实所谓的蒙皮矩阵,就是 \(K_{j}=M_{j}^{model}(t) \cdot\left(M_{b(j)}^{model}\right)^{-1}\)
为什么 DCC 的文件不记录成 local space 位置,明明这样还能省去逆矩阵的计算?
- local space 位置实际上是耦合了 skeleton 信息和 mesh 信息,而采用蒙皮矩阵方式可以轻松将 skeleton 套在任意的 mesh 上(例如换个人物模型)
- 实际上蒙皮动画的顶点是受 N 个 joint 影响的,那这样一个顶点就要记录 N 个 local space 位置,大大增加模型文件的体积
加权 Skinning Matrix
当然在蒙皮动画中,顶点往往受多个 joint 影响,因此需要计算它们的加权和,得到的结果就是顶点 \(V\) 的真正位置:
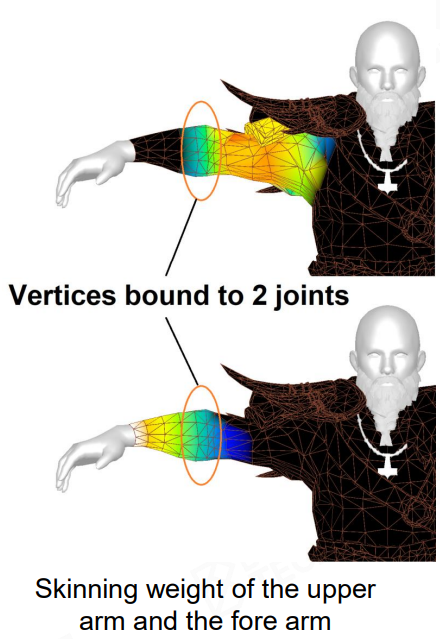
为什么顶点不设计成只受 1 个 joint 影响 ?
- 设计成受多个 joint 影响时,mesh 的变化会更加符合皮肤的特性,即可以在各种旋转扭曲等变化下保持肢体之间的连接性
- 若设计成只受 1 个 joint 影响,那么各个部位会看着像是一块块坚硬的刚体,且部位之间容易产生重叠、中空
Skinning Matrix Palette 优化
-
提前将各 joint 的蒙皮矩阵计算出来,形成一个 Skinning Matrix 数组送入 GPU 以供渲染使用
角色渲染的 vertex shader 也从以往的乘 \(MVP\) 矩阵变成乘 \(KM^{world}VP\) 矩阵
-
Skinning Matrix 的基础上再乘多一个 \(M^{world}\) 来把 model space 转换成 world space
角色渲染的 vertex shader 也从以往的乘 \(MVP\) 矩阵变成乘 \(K^{\prime}VP\) 矩阵
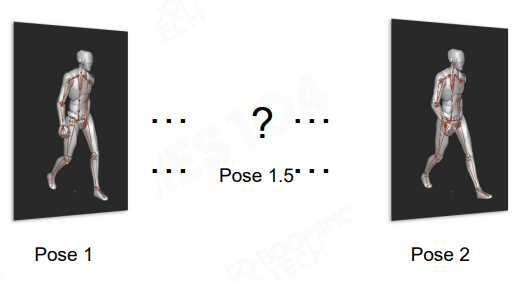
动画插值
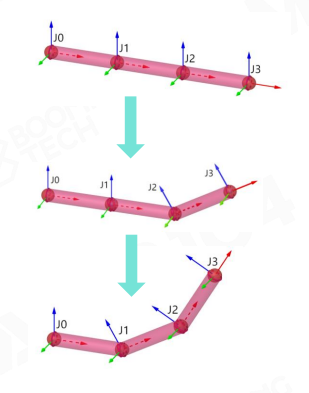
那么蒙皮动画该怎么驱动 skeleton 产生变化呢?
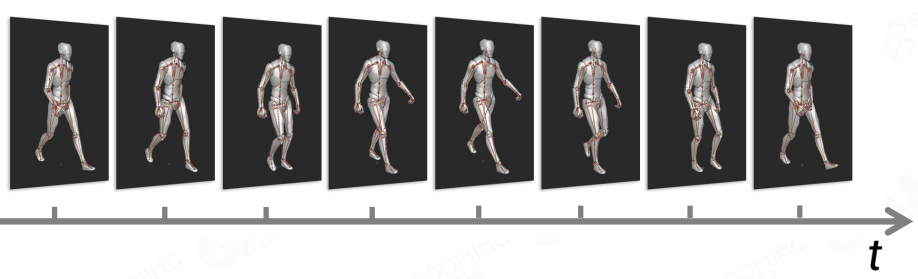
在每个关键帧上摆好一个 skeleton pose(这一系列的 skeleton pose 也被称为一个 Clip),然后再通过对前后两个关键帧 pose 的插值得到当前帧的 pose,也就是得到产生变化的 skeleton pose
注意:Joint Pose 插值应当在 local space 上进行,而不应当在 model space 上插值
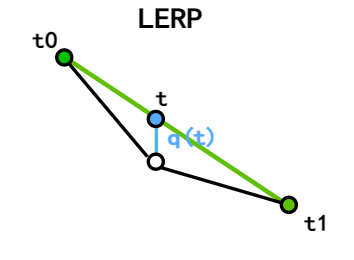
Translation & Scale 插值:LERP
对于 Translation 和 Scale 的插值,可以简单的使用 LERP(线性插值)。
Translation:
Scale:
\(a=\frac{t-t_{1}}{t_{2}-t_{1}}, t_{1}<t_{2}, t \in\left[t_{1}, t_{2}\right]\)
Rotation 插值:LERP, NLERP, SLERP
Rotation:
-
LERP(线性插值)
- 最直接的插值方式,可用于 Translation,Scale
- 但是往往不适用于 Rotation(四元数)插值
\[q_{t}=\operatorname{Lerp}\left(q_{t 1}, q_{t 2}, t\right)=(1-a) q_{t 1}+a q_{t 2} \]
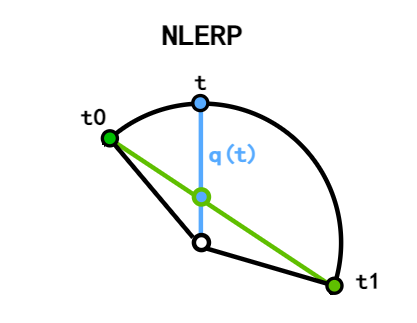
- NLERP
- 插值的角速度是不固定的
- 当 \(\theta\) 很小时,可以近似看成插值角速度相等
- SLERP
- 插值的角速度是固定的
- 但当 \(\theta\) 很小时,可能会出现零除问题
- 计算量稍大
\(\theta=\arccos \left(q_{t 1} \cdot q_{t 2}\right)\)
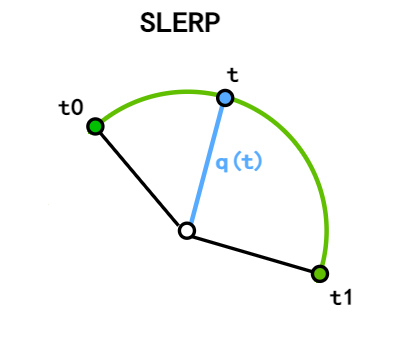
Rotation 插值方法结论:
- 当 \(\theta\) 很小时,使用 NLERP 进行四元数插值
- 当 \(\theta\) 很大时,使用 SLERP 进行四元数插值
动画压缩
减少 DoF(自由度)
scale:
- 可以舍弃 scale 属性(通常 joint 的 scale 是不会发生改变的,除了面部 joint)
translation:
- 可以舍弃 translation 属性(通常 joint 的 translation 是不会发生改变的,除了面部 joint,pelvis joint 等)
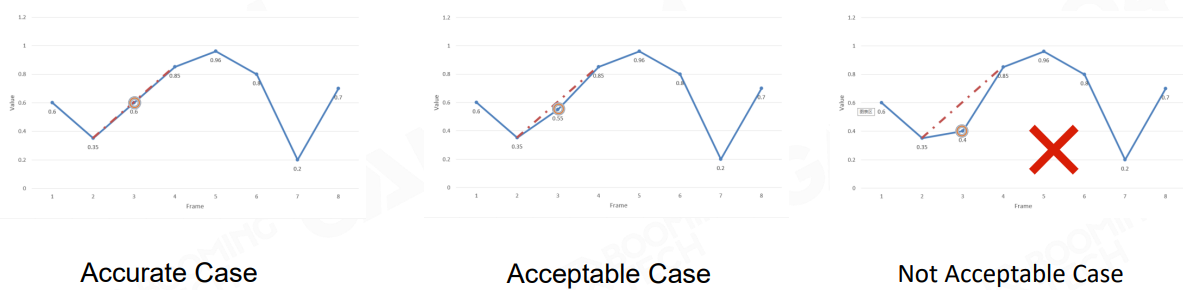
减少线性关键帧
当 Clip 中存在有一些关键帧 pose 和其前后关键帧 pose 插值结果相差不大时,我们可以移除掉这种关键帧,这样可以减少动画 Clip 的体积:
KeyFrame = {}
for i = 1 to n-1 do
frame_interp = Lerp(frame[i-1], frame[i+1])
error = Diff(frame[i], frame_interp)
if isNotAcceptable(error) then
KeyFrame.insert(frame[i])
end
end
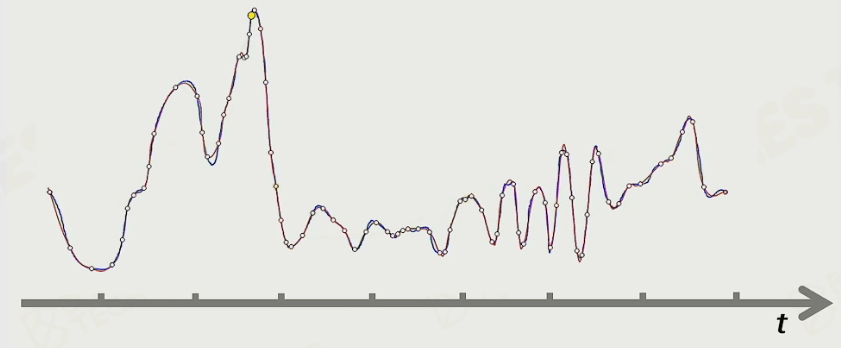
Catmull-Rom Spline 拟合动画曲线
现实捕捉出的动画往往是各种曲线的,如果默认用线性来拟合真实动画曲线(离线拟合),那么可能会产生大量关键帧。
而 Catmull-Rom Spline 可以用四个控制点(P0, P1, P2, P3)来生成一条从 P1 到 P2 的曲线,
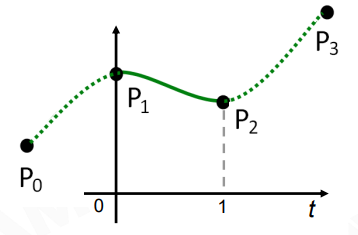
将其用于拟合真实动画可以节省大量关键帧:
这样在 Clip 的关键帧间我们将通过下式计算出在 Catmull-Rom Spline 中的插值结果:
\(a\) 决定了曲线的弯曲程度有多尖锐 (通常会设置 \(a=0.5\))
Float Quantization
实际上动画中的各属性的 float 数值很少达到 float 可表达的最大范围(约 -3.4e+38 ~ 3.4e+38),因此我们可以先设定一个值域范围 \([v0, v1]\) ,然后均匀映射到更少位(如 16 位)的无符号整型范围上,这样的无符号整型中每相隔 1 就是代表了 \(\frac{v1-v0}{2^{16}}\) 的数值(同时也代表了这种表示的精度)。
Scale:可以采用 16 位 float quantization(原始存储需要 32 位,即1个float)
Translation:可以采用 3 个 16 位 float quantization(原始存储需要 96 位,即3个float)
四元数:可以采用 48 位的存储方案(原始存储需要 128 位,即4个float):
- 使用 2 位来表达哪个分量被丢弃了:即指明 X, Y, Z, W 哪个分量的绝对值最大,这样抛弃掉该分量后,可以由四元数性质通过 \(1-\sum_{other}{scalar}^{2}\) 来推导出来
抛弃绝对值最大的分量,实际上就是保留绝对值较小的分量,这样做可以减少一些精度误差
- 使用 15 位来表达每个 float quantization ,值域范围在 \(\left[-\frac{1}{\sqrt{2}}, \frac{1}{\sqrt{2}}\right]\), 精度便是 \(\sqrt{2} / 32767 \approx 0.000043\)

综上,原本一个 joint pose 需要存储 scale, translation, rotation 共 32 字节,用了 float quantization 后可以压缩成 14 字节。
动画误差
我们知道压缩动画必定会牺牲精度,如何让动画既能满足压缩性能又能满足视觉上的正确性(看起来没太大问题就是没问题)?那么我们需要通过离线方法去测量动画的误差并尽可能修正误差,在这些步骤完成后才可以将该动画文件交给玩家老爷们观赏。
误差传播
在动画压缩中,尤其要注意 误差传播:某个 joint pose 产生了误差,那么它的 child joint 会进一步放大这个误差,并且 child 的 child 会递归式地继续放大误差...
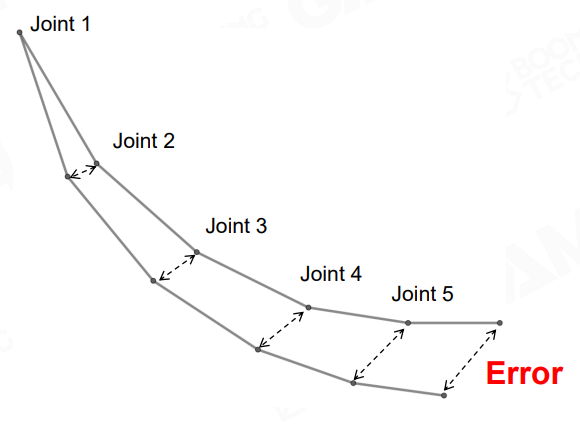
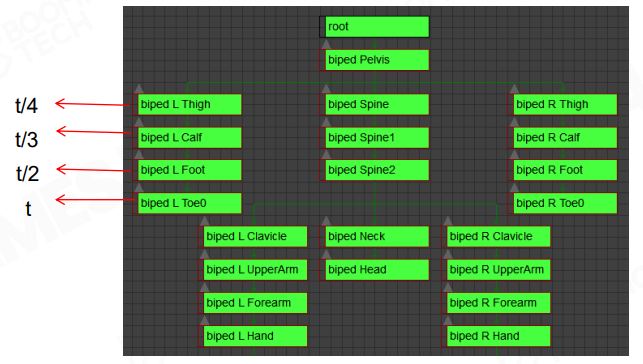
也就是说每个 joint 的误差容忍能力是不同的,而且越靠近 root 的 joint 误差容忍能力越低,反之越接近叶节点的 joint 误差容忍能力越强。我们可以根据 skeleton 层级来决定每个 joint 结点的最大误差
图中叶节点的最大误差值为 \(t\)
误差测量
通过观测视觉上的动画错误来测量误差是低效率的,而且往往容易看漏。
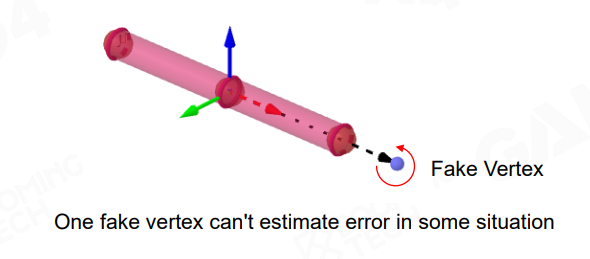
可以在每个 joint 的两个正交方向上分别放置 Fake Vertex,测量出压缩前和压缩后的 Fake Vertex 位置差,这个位置差便是动画误差:
- 角色骨骼的 Fake Vertex 一般放置在距离 joint 2~10 cm 的地方
- 长物体一般放置在距离 joint 1~10 m 的地方
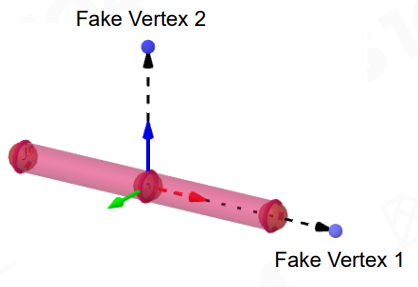
为什么 joint 得放置两个正交方向上的 Fake Vertex,而不是一个 Fake Vertex?
例如在下面情形,joint 出现旋转误差,单个方向上的 Fake Vertex 是无法测量出来的:
误差补偿
假设在某一关键帧中,parent joint pose 因压缩产生的误差被测量了出来,那么在当前 joint pose 可以做一些反向补偿:例如直接修改当前 joint pose 反向增加该误差值并更新到当前 joint pose
\(Pose_{j} := Pose_{j}-Error(Pose_{p(j)})\)
当然,当前 joint pose 仍然还是会产生误差,但是抵消了它上一级的误差,因此它的 child joint pose 仍然可以继续使用误差补偿来抵消这一级的误差,从而最终让各级压缩的 joint pose 更加贴合精确 joint pose
但是它也是有缺点的:
- 初始的 joint pose 动画是平滑的、低频的,但是引入误差补偿,实际上就是引入高频信息,因此越到末端的 joint 越容易出现一些奇怪的抖动(例如末端的肢体可能会发生高频的抽搐抖动)
参考
个人感想:所谓动画,核心实际上就是压缩,即如何用有限的计算机数据表现现实生活中栩栩如生的角色动画(压缩大小与压缩质量的平衡)。例如只记录关键帧而不记录每一帧,中间帧通过插值计算出来就是一种压缩现实数据的方式;用几十个 joint 组成的 skeleton 来表示人体骨骼也是一种简化现实数据的方式;插值方式, 压缩方法, 误差补偿等等...无一不是为了这两个方面去服务
作者:KillerAery
出处:http://www.cnblogs.com/KillerAery/
本文版权归作者和博客园共有,未经作者同意不可擅自转载,否则保留追究法律责任的权利。

