
etcd raft如何实现成员变更
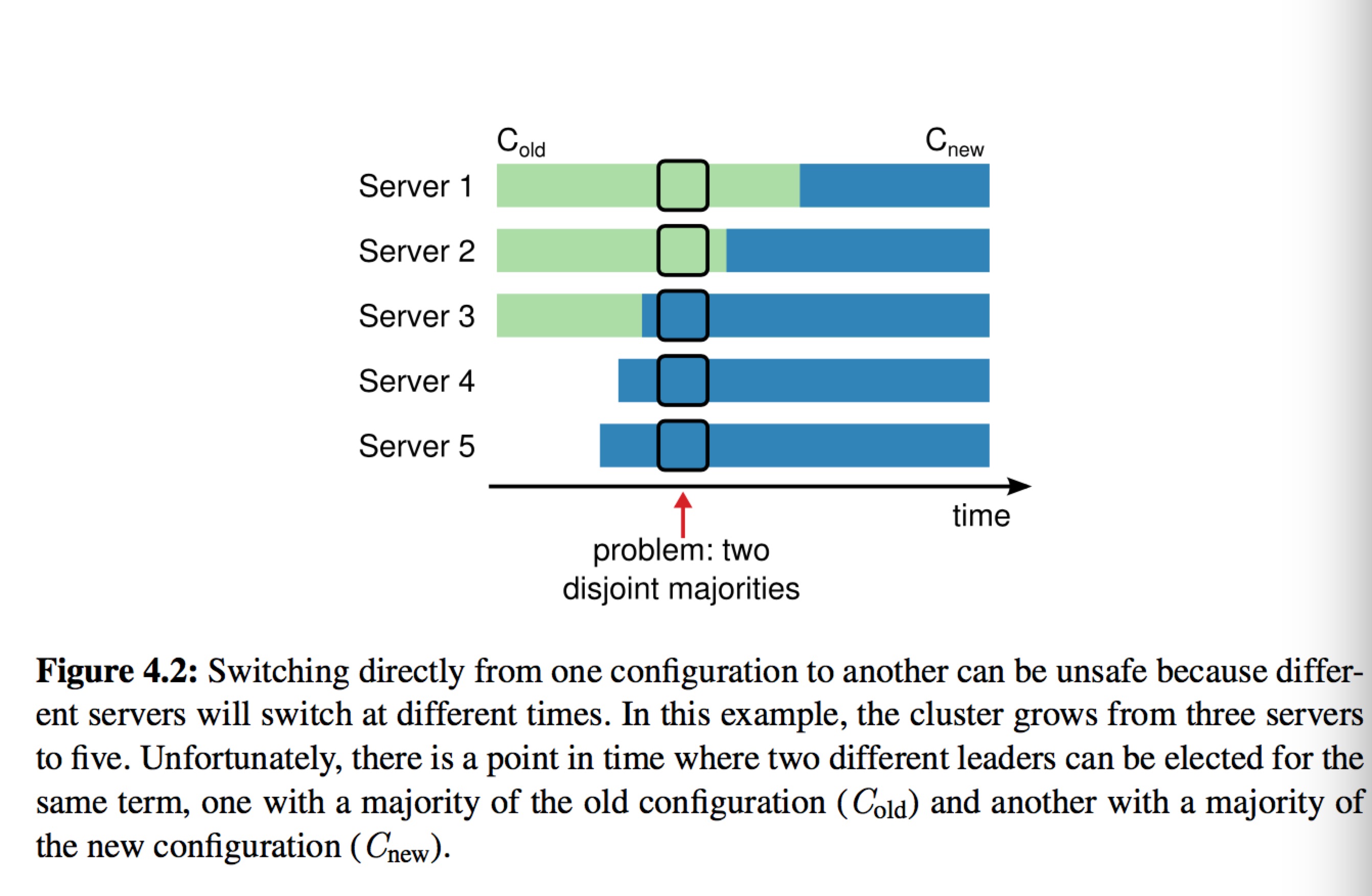
成员变更在一致性协议里稍复杂一些,由于不同的成员不可能在同一时刻从旧成员组切换至新成员组,所以可能出现两个不相交的majority,从而导致同一个term出现两个leader,进而导致同一个index的日志不一致,违反一致性协议。下图是个例子:
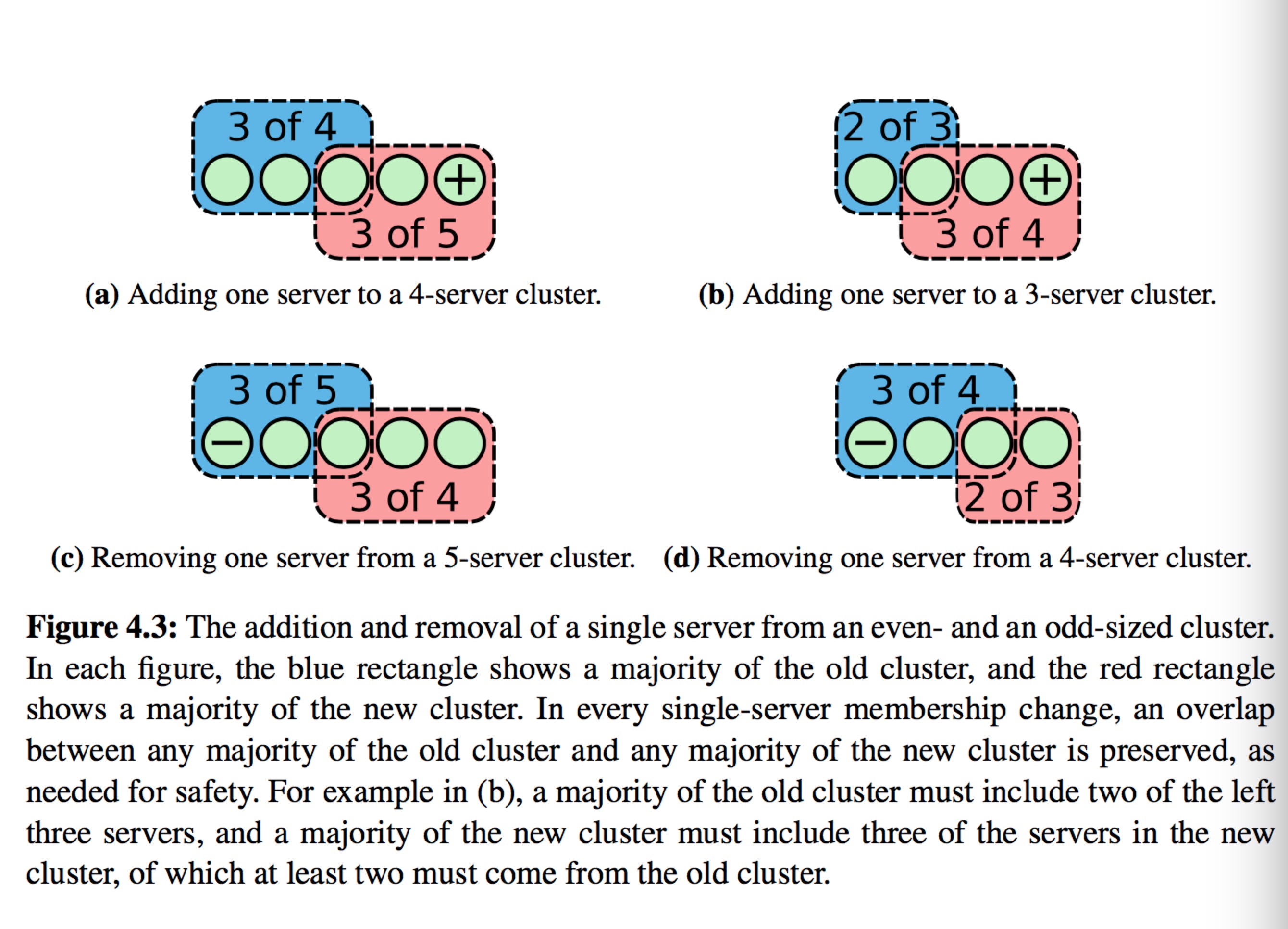
raft作者提出了一种比较简单的方法,一次只增加或减少一个成员,这样能够保证任何时刻,都不可能出现两个不相交的majority,所以,可以从旧成员组直接切到新成员组。如下图:
切换的时机是把成员变更日志写盘的时候,不管是否commit。这个切换时机带来的问题是如果这条成员变更日志最终没有commit,在发生leader切换的时候,成员组就需要回滚到旧的成员组。
etcd raft为了实现简单,将切换成员组的实机选在apply成员变更日志的时候。
下面看看etcd raft library如何实现的:
应用调用
func (n *node) ProposeConfChange(ctx context.Context, cc pb.ConfChange) error {
data, err := cc.Marshal()
if err != nil {
return err
}
return n.Step(ctx, pb.Message{Type: pb.MsgProp, Entries: []pb.Entry{{Type: pb.EntryConfChange, Data: data}}})
}
可以看出,ConfChange是和普通的log entry一样封装在MsgProp消息中,进入propc,
跑raft算法的goroutine从propc中拿到消息后,会做如下判断:
for i, e := range m.Entries {
if e.Type == pb.EntryConfChange {
if r.pendingConf {
r.logger.Infof("propose conf %s ignored since pending unapplied configuration", e.String())
m.Entries[i] = pb.Entry{Type: pb.EntryNormal}
}
r.pendingConf = true
}
}
检查已经有成员变更正在做,就忽略新的成员变更。然后将pendingConf置为true,意味着目前有成员变更正在做了,从这里可以看出,多个成员变更不能同时进行。follower接收端的处理和普通log entry一样。
如果成员变更日志达成了一致,则会被封装在Ready中,应用拿到后,做如下处理:
if entry.Type == raftpb.EntryConfChange {
var cc raftpb.ConfChange
cc.Unmarshal(entry.Data)
s.Node.ApplyConfChange(cc)
}
ApplyConfChange:
func (n *node) ApplyConfChange(cc pb.ConfChange) *pb.ConfState {
var cs pb.ConfState
select {
case n.confc <- cc:
case <-n.done:
}
select {
case cs = <-n.confstatec:
case <-n.done:
}
return &cs
}
讲ConfChange放入confc,然后阻塞在confstatec上,跑raft协议的goroutine从confc中拿出ConfChange,做相应的增加/删除节点操作,然后将成员组放入confstatec。
switch cc.Type {
case pb.ConfChangeAddNode:
r.addNode(cc.NodeID)
case pb.ConfChangeRemoveNode:
// block incoming proposal when local node is
// removed
if cc.NodeID == r.id {
propc = nil
}
r.removeNode(cc.NodeID)
case pb.ConfChangeUpdateNode:
r.resetPendingConf()
default:
panic("unexpected conf type")
}
select {
case n.confstatec <- pb.ConfState{Nodes: r.nodes()}:
case <-n.done:
}
增加/删除节点操作都只是更新prs,map的每个元素保存一个peer的状态,其中最重要的状态莫过于
Match, Next uint64
看过raft小论文的人一看变量名就很明确意义,Match代表最大的已经落盘的log index,Next代表下一条需要发给这个peer的log index。然后将pendingConf置为false,代表成员变更结束。
重启如何恢复成员组:
hs, cs, err := c.Storage.InitialState()
Storage接口中:
// InitialState returns the saved HardState and ConfState information.
InitialState() (pb.HardState, pb.ConfState, error)
Storage是个接口,其中InitialState()用于恢复成员组,需要应用自己实现,通常将ConfState记在最后一次Snapshot的Metadata中:
message SnapshotMetadata {
optional ConfState conf_state = 1 [(gogoproto.nullable) = false];
optional uint64 index = 2 [(gogoproto.nullable) = false];
optional uint64 term = 3 [(gogoproto.nullable) = false];
}
ConfState:
message ConfState {
repeated uint64 nodes = 1;
}
拿到ConfState后就可以初始化上面提到的prs,snapshot后续的已经commit的log entry一样,通过Ready封装,应用进行apply,如果其中有ConfChange,则调用
s.Node.ApplyConfChange(cc)

