【学习笔记:计算几何基础3】 Convex Hull
Ahead
10.6.2018
算法5(GS)
最优算法O(nlogn)
实现
1.预处理排序
选取LTL与第二LTL 对剩下的点进行极角排序 (ToLeft Text)
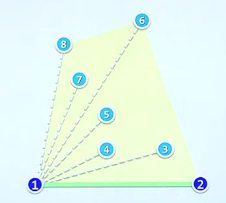
2.开两个栈T与S (开头相对!!! ,为了好看)将已连接的边放入S,其余的按极角大小放入T

3.三个指针指向S的栈顶与次栈顶以及T的栈顶S[0],S[1],T[0]
代码
while(!T.empty())
{
ToLeft(S[1],S[0],T[0])?S.push(T.pop()):S.pop();
}
4.最后对S栈自底向上是凸包的环路描述
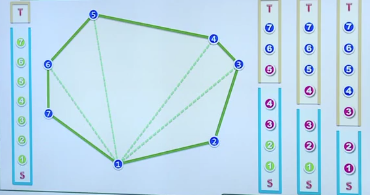
这是大概的流程图
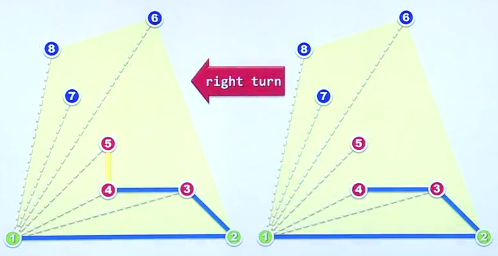
理解
每次退S栈表示一次回溯,否则是一次加边,那么对于弹S 表示S栈顶的元素偏内,而新节点更外面,就目前而言应该往右拐 (模拟一下就可以看出了)
正确性
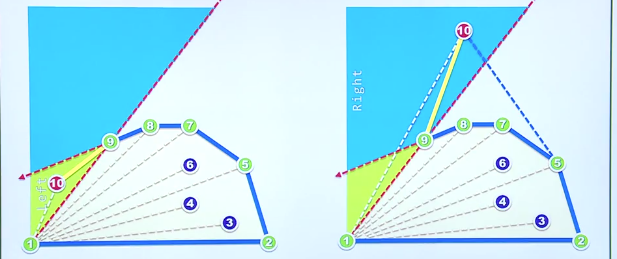
下一个拓展点一定位于黄区或者蓝区,如果黄区直接拓展,如果蓝区,那么显然就是一个退栈的过程 也就是把在右边的退了,从而达到我们需要的状态 (弹一个判断一个)
复杂度分析
对于每次操作必然带着一次栈操作,那么一个点最多经历一次退栈一次入栈一次出栈,所以是O(n)的操作时间 加上预处理所以为O(nlogn) 。
Presorting?
一个很显然的方法就是去求夹角,不过还是会有误差。
和之前的算法一样我们尝试使用ToLeft 也就是把比较器变成ToLeft,越左边,越后面
简化
如果输入的数据已经在X或Y或某一方向上有序,那么,就能看成垂直该方向的两个无穷远处构造凸包,分别构造出上凸包(upper hull)和下凸包(lower hull) 从而可以将时间优化至O(n);
当然关于闭包的算法还有很多,不过GS算法已经足够优秀了

