stm32与红外遥控器(NEC协议)
1.器件简介
本次测试采用R903V1红外接收头与NEC协议的红外遥控器,接收头原理图如下:
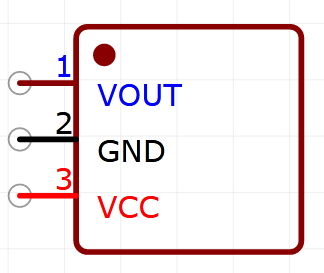
器件的供电电压VCC在2.7V~5.5V之间,输出电压VOUT正常在0.2v ~(VCC-0.3±0.2)v,注意高低电平输出脉冲宽度最小都在400us~800us之间。
NEC 码的位定义:一个脉冲对应 560us 的连续载波,一个逻辑 1 传输需要 2.25ms(560us脉冲+1680us 低电平),一个逻辑 0 的传输需要 1.125ms(560us 脉冲+560us 低电平)。而遥控接收头在收到脉冲的时候为低电平,在没有脉冲的时候为高电平,这样,我们在接收头端收到的信号为:逻辑 1 应该是 560us 低+1680us 高,逻辑 0 应该是 560us 低+560us 高。同时NEC码还规定了连发码由 9ms 低电平+2.5m 高电平+0.56ms 低电平+97.94ms 高电平组成。
NEC协议的数据格式:同步码头、地址码、地址反码、控制码、控制反码。同步码由一个 9ms 的低电平和一个 4.5ms 的高电平组成,地址码、地址反码、控制码、控制反码均是8 位数据格式。正常是按照低位在前,高位在后的顺序发送,但是我测试是按照高位在前,低位在后的。采用反码是为了增加传输的可靠性(可用于校验)。

2.硬件连接
简单说一下,红外接收器电压接3.3V,VOUT连接单片机的输入捕获引脚即可。
3.软件设计
使用stm32单片机的输入捕获功能,用stm32cubemx进行设置:

这里解释主要参数部分:
prescaler:预分频器,设置为72
counter mode:计数模式,设为向上计数
counter period:计数周期,设为65535
polarity selection:边沿检测方式,选择下降沿检测,程序里还是改成了上升沿检测
input filter:输入滤波器,设为8,是指连续采集到8个一样的高/低电平才计作高/低电平
在MAIN中开启输入捕获:


while (1) { switch(cap_state) { case 0: __HAL_TIM_SET_CAPTUREPOLARITY(&htim5, TIM_CHANNEL_2, TIM_INPUTCHANNELPOLARITY_RISING);//设置为上升沿捕获 HAL_TIM_IC_Start_IT(&htim5, TIM_CHANNEL_2); //启动输入捕获 cap_state++; break; } /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ }
/定时器输入捕获中断回调函数 void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)//捕获中断发生时执行 { if(htim->Instance==TIM5) { switch(cap_state) { case 1: rise_value[rise_i] = HAL_TIM_ReadCapturedValue(&htim5,TIM_CHANNEL_2);//取上升沿时刻 __HAL_TIM_SET_CAPTUREPOLARITY(&htim5,TIM_CHANNEL_2,TIM_ICPOLARITY_FALLING); //设置为下降沿捕获 cap_state++; break; case 2: fall_value[fall_i] = HAL_TIM_ReadCapturedValue(&htim5,TIM_CHANNEL_2);//取下降沿时刻 if(fall_value[fall_i] > rise_value[rise_i]) { rising_time[t_i] = fall_value[fall_i] - rise_value[rise_i];//高电平时间获取 }else { rising_time[t_i] = 65535 + fall_value[fall_i] - rise_value[rise_i];//高电平时间获取 } //控制码 if(same_i == 1) { cnt+=1; //地址码1~8 if(t_i<8) { if(rising_time[t_i]>500&&rising_time[t_i]<600) { address <<= 1; address+=0; }else if(rising_time[t_i]>1500&&rising_time[t_i]<1800) { address <<= 1; address+=1; } }else if(t_i>16&&t_i<25)//控制码17~24 { if(rising_time[t_i]>500&&rising_time[t_i]<600) { rec <<= 1; rec+=0; }else if(rising_time[t_i]>1500&&rising_time[t_i]<1800) { rec <<= 1; rec+=1; } } t_i++; rise_i++; fall_i++; } //同步码 if(rising_time[t_i]>4300&&rising_time[t_i]<4700) { //同步码正确 same_i=1; t_i++; rise_i++; fall_i++; } HAL_TIM_IC_Stop_IT(&htim5,TIM_CHANNEL_2); //停止捕获 cap_state=0; break; } } }
//按键中断回调 void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { //KEY0 if (GPIO_Pin==GPIO_PIN_5) { HAL_Delay(20);/* 延时一小段时间,消除抖动 */ if (HAL_GPIO_ReadPin(GPIOC,GPIO_PIN_5)==0) { HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_8); for(int i=0;i<=fall_i;i++) { if(fall_value[i] > rise_value[i]) { rising_time[i] = fall_value[i] - rise_value[i];//高电平时间获取 }else { rising_time[i] = 65535 + fall_value[i] - rise_value[i];//高电平时间获取 printf("hear:%d\r\n",i); } printf("高电平[%d]:%d us 下降沿时刻[%d]:%d us 上升沿时刻[%d]:%d us\r\n",i,rising_time[i],i,fall_value[i],i,rise_value[i]); } printf("地址:%d 控制码:%lld\r\n",address,rec); rise_i=fall_i=same_i=t_i=cnt=address=rec=0; } __HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_5); } }
大致说一下程序流程,在main中循环开启上升沿检测输入捕获功能(case 0),接着在输入捕获中断回调里记下上升沿触发时刻(rise_value),并改为下降沿检测捕获,再记下下降沿触发时刻(fall_value)并关闭捕获功能。
高电平持续时间(rising_time) = 下降沿触发时刻(fall_value) - 上升沿触发时刻(rise_value)
获取到一系列高电平以后(看示波器图),根据高电平持续时间进行数值移位换算,可以得到对应的地址码和控制码,串口打印如下:
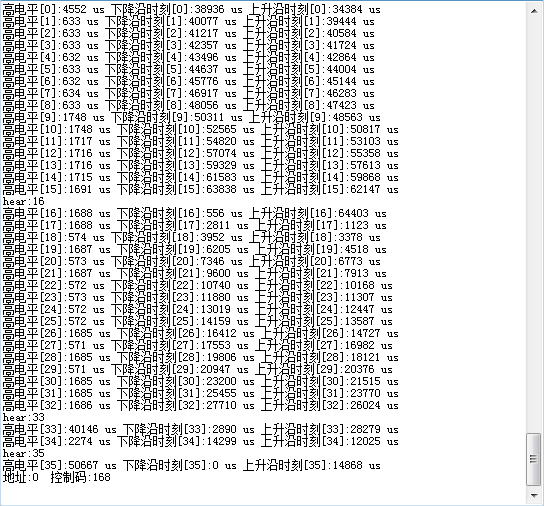
打印结果中的hear是下降沿时刻溢出的情况,计算时需要在下降沿时刻基础上再加65535才可以。
感兴趣的可以试一试,需要原工程的留言我发。

