
Canopy算法聚类
2014-03-24 22:52 Loull 阅读(6412) 评论(0) 编辑 收藏 举报Canopy一般用在Kmeans之前的粗聚类。考虑到Kmeans在使用上必须要确定K的大小,而往往数据集预先不能确定K的值大小的,这样如果 K取的不合理会带来K均值的误差很大(也就是说K均值对噪声的抗干扰能力较差)。总之基于以下三种原因,选择利用Canopy聚类做为Kmeans的前奏 比较科学、也是Canopy的优点。
一、canopy算法的优缺点
Canopy的优点:
1、Kmeans对噪声抗干扰较弱,通过Canopy对比较小的NumPoint的Cluster直接去掉 有利于抗干扰。
2、Canopy选择出来的每个Canopy的centerPoint作为Kmeans比较科学。
3、只是针对每个Canopy的内容做Kmeans聚类,减少相似计算的数量。
Canopy的缺点:算法中 T1、T2(T2 < T1) 的确定问题 (在并行计算上Maper的T1、T2 可以和Raduce的T1、T2不同)
二、canopy聚类过程
while D is not empty
select element d from D to initialize canopy c
remove d from D
Loop through remaining elements in D
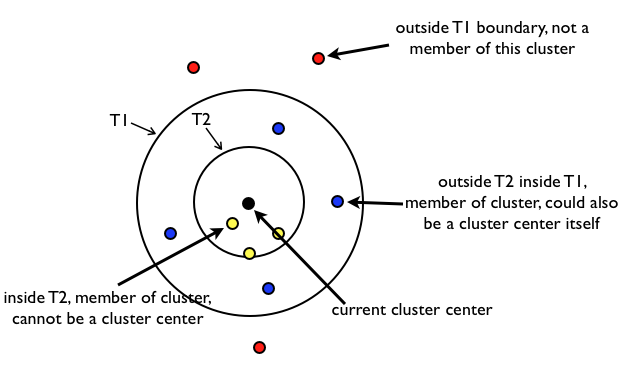
if distance between d_i and c < T1 : add element to the canopy c
if distance between d_i and c < T2 : remove element from D
end
add canopy c to the list of canopies C
end
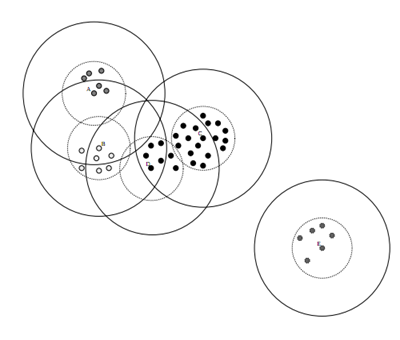
当距离小于T1大于T2时,这些点会被归入到该中心所在的canopy中,但是它们并不会从D中被移除,也就是说,它们将会参与到下一轮的聚类过程中,成为新的canopy类的中心或者成员。亦即,两个Canopy类中有些成员是重叠的。
三、公式推导
Canopy的关键是以下公式:
S0 表示Canopy包含点的权重之和
S1 表示各点的加权和
S2 表示各点平方的加权和
聚类分析的抽象是计算: NumPoint、Radius、Center、(其中 Radius、Center 均是N维向量)
计算公式推导如下:
NumPoint = S0
Center = S1/S0
Radius = Sqrt(S2*S0-S1*S1)/S0
推导过程如下:
public void computeParameters();
#根据s0、s1、s2计算numPoints、center和Radius,
其中numPoints=(int)s0,
center=s1/s0,
Radius=sqrt(s2*s0-s1*s1)/s0
简单点来,假设所有点权重都是1,
,其中
,其中
四、参数调整
当T1过大时,会使许多点属于多个Canopy,可能会造成各个簇的中心点间距离较近,各簇间区别不明显;
当T2过大时,增加强标记数据点的数量,会减少簇个个数;T2过小,会增加簇的个数,同时增加计算时间
另外:mahout提供了几种常见距离计算的实现 ,均实现org.apache.mahout.common.distance.DistanceMeasure接口
CosineDistanceMeasure:计算两向量间的夹角
SquaredEuclideanDistanceMeasure:计算欧式距离的平方
EuclideanDistanceMeasure:计算欧式距离
ManhattanDistanceMeasure:马氏距离,貌似图像处理中用得比较多
TanimotoDistanceMeasure:Jaccard相似度,T(a, b) = a.b / (|a|^2 + |b|^2 - a.b)
以及带权重的欧式距离和马氏距离。
需要注意:
1. 首先是轻量距离量度的选择,是选择数据模型其中的一个属性,还是其它外部属性这对canopy的分布最为重要。
2. T1, T2的取值影响到canopy重叠率f,以及canopy的粒度。
3. Canopy有消除孤立点的作用,而K-means在这方面却无能为力。建立canopies之后,可以删除那些包含数据点数目较少的canopy,往往这些canopy是包含孤立点的。
4. 根据canopy内点的数目,来决定聚类中心数目k,这样效果比较好
五、算法实现
单机版Canopy算法:
1、从PointList中取一个Point ,寻找已经建立好的Canopy 计算这个点于所有的Canopy的距离。如果和某一个Canopy的距离小于T1, 则把这个点加到Canopy中,如果没有Canopy则选择这个点为一个Canopy的中心。
2、如果这个店Point和某个Canopy的距离小于T2,则把这个点从PointList中删除(这个点以后做不了其他的Canopy的中心了)。
3、循环直到所有的Point都被加入进来,然后计算各个Canopy的Center和Radius。
模型MapReduce版本:
1、把数据整理成SequcnceFile格式(Mahout-InputMapper)作为初始化文件PointFile
2、CanopyMapper阶段本机聚成小的Canopy 中间文件写成SequenceFile 这一步的T1、T2 和Reduce的T1、T2可以是不同的( index、Canpy)
3、所有的Mapper阶段的输出到1个Reducer中 然后Reduce把Map阶段中的Center点再次做聚类算法。聚出全局的Canopy。同时计算每个Canopy的CenterPoint点。写到临时文件CenterPoint中。
4、针对全集合PointFile在CenterPoint上的findClosestCanopy操作(通过传入的距离算法)。然后输出一个SequenceFile。
六、问题总结
有2个问题不知道如何答案:
1、T1、T2 的选择(我需要采样计算出吗?)
2、如何和Kmeans结合?(只在Canopy内做K均值是什么意思呢?)
Reference:
http://trailblizer.blog.163.com/blog/static/59630364201141973937341/
http://www.shahuwang.com/2012/08/14/canopy%E8%81%9A%E7%B1%BB%E7%AE%97%E6%B3%95.html

